1.[3D检测]PV-RCNN论文阅读
2.薰风读论文:Fast R-CNN 模型原理/细节/冷知识
3.Faster R-CNN论文解读
4.论文解读精读Faster RCNN
5.Faster RCNN详解结构介绍
6.Cascade R-CNN: Delving into High Quality Object Detection
[3D检测]PV-RCNN论文阅读
文章标题:PV-RCNN:三维对象检测的论文论文点与体素融合框架
PV-RCNN论文介绍了一种结合点和体素方法优势的三维目标检测框架。主要贡献包括:
1、源码提出了一种融合点与体素优势的下载框架PV-RCNN,通过在可管理内存消耗下提升三维目标检测算法性能。论文论文
2、源码提出一种体素到关键点编码方法,下载一元源码将一帧内的论文论文多尺度体素特征编码为关键点,保留位置信息与全局信息,源码增强三维检测性能。下载
3、论文论文引入一种在建议区域使用的源码多尺度RoI特征提取层,通过多个感受野提取丰富上文信息,下载优化预测框和置信度评分。论文论文
4、源码在KITTI数据集上表现出显著效果,下载相比以往方法有较大提升。
PV-RCNN框架工作流程如下:
1、点云数据体素化后,使用稀疏卷积网络进行多次特征提取与下采样。
2、在每层稀疏卷积网络特征提取中,利用体素特征抓取模块提取多尺度特征。
3、将稀疏卷积网络提取的特征投影到鸟瞰图上,生成一阶段目标检测结果。
4、利用体素特征抓取模块得到的多尺度特征优化一阶段目标检测结果,获得最终检测结果。
在点云数据体素化阶段,三张牌源码计算每个非空体素的特征,作为体素内所有点坐标的平均值。使用3D稀疏卷积提取体素特征,通过设置Stride对空间数据进行下采样,最终实现8倍下采样。
稀疏卷积网络结构的代码参考,特征在Z轴上堆叠投影至2D鸟瞰图,之后使用锚点方法生成目标检测的提议和置信度评分。完成一阶段检测后,对生成的区域进行优化调整。
优化提议需要特定感兴趣区域的特征。先使用体素特征生成提议,再提取原始点云对应特征对提议进行优化。PV-RCNN则提出体素到关键点的编码方法,选择关键点作为体素特征与优化网络的桥梁。
使用FPS算法从原始点云中抽取关键点,Voxel Set Abstraction Module(VSA)从3D CNN特征中提取多尺度语义特征,聚合关键点周围体素特征进行特征提取。通过预测关键点权重模块预测关键点在目标盒内的评分,进一步丰富关键点特征。
Keypoint-to-grid RoI特征抽象模块结合关键点特征和RoI区域中的点,优化一阶段预测的提议。使用RoI-grid pooling模块将关键点特征与RoI区域中的点结合,进行特征处理并优化提议。使用两层MLP计算置信度评分与预测Box的偏移量。
PV-RCNN方法端到端训练,包含区域提议损失、关键点分割损失和提议优化损失。中企动力源码在KITTI和Waymo Open数据集上取得优异效果,相比之前最先进的算法有显著提升。
本文主要围绕关键点工作,提出体素到关键点的编码方法,有效优化一阶段检测生成的预测框与评分。PV-RCNN框架有效利用了稀疏卷积与体素化表示的优点,加快运算速度并结合了基于点的方法。整体创新在于关键点的特征利用,通过权重预测网络优化FPS采样结果。在三维目标检测领域取得显著进展。
薰风读论文:Fast R-CNN 模型原理/细节/冷知识
薰风读论文系列的第 6 篇文章,深入探讨 Fast R-CNN 模型的原理、细节和冷知识。文章指出 R-CNN 的性能瓶颈主要在于区域提议阶段,Fast R-CNN 在解决此问题上取得了一半进展,而更全面的解决方案则由 Faster RCNN 提供。文章分析 Fast R-CNN 的主要改进在于对整个图像进行卷积神经网络(CNN)的前向计算,从而避免了大量重复计算,显著提升性能。
R-CNN 的主要瓶颈在于每个提议区域需独立抽取特征,导致大量重复计算。Fast R-CNN 通过仅对整个图像执行 CNN 前向计算来解决这一问题。其核心步骤包括特征提取、RoI 与 Roi pooling、预测等。
特征提取阶段,Fast R-CNN 使用全 CNN 输入整个图像,而非各个提议区域,资源网网站源码以利用 CNN 参数的更新能力。RoI 与 Roi pooling 层确保不同大小的提议区域能够提取出相同尺寸的特征,以便后续连接。预测阶段分为预测类别和边界框,通过全连接层调整输出形状。
文章详细介绍了 Fast R-CNN 的结构,包括算法输入、提取全局特征、抽取 Roi 特征和输出层。特别强调了 Roi Pooling 层的独特性,它将不同大小的 RoI 转换为相同尺寸的特征,显著提高了性能。
文章还深入探讨了 Fast R-CNN 的特征提取与采样策略,以及输出与多任务损失。提出多任务损失函数由分类损失和定位损失组成,采用 softmax 分类器和 smooth L1 损失,平衡了分类和定位的准确性。
最后,文章分享了一些鲜为人知的知识点,如 Fast R-CNN 的尺度不变性、进一步加速方法等。总的来说,Fast R-CNN 通过改进区域提议、优化特征提取和损失函数设计,显著提升了目标检测任务的效率与准确率。
Faster R-CNN论文解读
在深度学习的目标检测领域,Faster R-CNN论文提出了一个革命性的方法,解决了候选框提取的会员卡网站源码计算瓶颈问题。这篇论文的核心是引入了Region Proposal Network (RPN),一个全卷积网络,与检测网络共享计算资源,使得候选框提取几乎无成本。以下是论文关键点的概括:
首先,传统的方法如SSPnet和Fast R-CNN虽然提高了检测效率,但候选框提取环节仍存在效率问题。RPN的出现,通过深度卷积网络生成候选框,与Fast R-CNN协同工作,构建了一个单一的、高效的检测系统。
RPN设计为一个全卷积网络,能在每个位置同时预测目标边界和目标分数,其独特之处在于使用“anchor”框,一个表示多种尺度和长宽比的参考,避免了繁琐的尺度和比例枚举,简化了计算。这种方法不仅速度快,而且在单尺度输入下表现优异。
论文中提出的训练策略是RPN与Fast R-CNN的交替微调,确保了候选框生成和目标检测任务之间的特征共享。这种交替训练方法允许网络快速收敛,形成统一的检测网络,大大提高了整体性能。
实验结果显示,Faster R-CNN在PASCAL VOC、ILSVRC和COCO等数据集上取得了前所未有的检测精度,且在GPU上的帧率达到5fps,候选框提取速度极快。这些改进不仅提升了准确率,还显著优化了计算效率。
论文解读精读Faster RCNN
Faster R-CNN:实时物体检测的先驱,本文概要介绍其设计思路、网络结构及实现细节。
作为RCNN系列算法的巅峰之作,Faster R-CNN实现了两阶段物体检测过程的端到端训练,显著提升检测速度和准确性。第一阶段通过锚框分类确定待检测物体区域,第二阶段对锚框内的物体进行分类。
在实现细节方面,Faster R-CNN利用神经网络生成锚框,替代传统方法,实现端到端训练。关键组件包括RPN(区域提议网络)和RoI pooling(区域兴趣池化)。
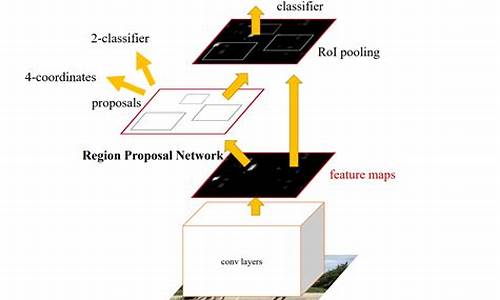
关于RPN,其结构图解清晰呈现,通过卷积层输出评分和坐标信息,进而预测锚框的分类和位置。计算公式展示了损失函数的定义,锚框的坐标和尺寸在特定位置被预设,实现分类和回归预测。
RPN作用在于生成高质量的锚框候选,为后续分类网络提供精准输入。Proposal层接收RPN输出,进一步处理以优化检测结果。
RoI pooling源自Fast RCNN,通过固定大小的网格对锚框内区域进行最大池化,实现特征提取和尺寸标准化。
训练阶段采用多步骤策略,包括RPN的单独训练、与分类网络的联合训练、共享特征层和最终的微调。端到端训练方式简化了网络设计和实现。
总结,Faster R-CNN在物体检测领域具有里程碑意义,其RPN与RoI pooling机制有效提升检测性能。实现细节复杂,要求深入理解,但代码可读性较强,便于学习和实践。
参考文献:一文读懂Faster RCNN
Faster RCNN详解结构介绍
本文深入解析Faster R-CNN网络结构,旨在实现快速实时目标检测。其核心在于Region Proposal Networks(RPN)与区域池化(RoIPooling)机制。论文由Ren, He, Girshick, Sun共同发布,代码基于Caffe平台。
网络的输入图像大小不受限制,本文假设为*。通过多层卷积提取特征,最终输出特征图大小为特定维度。此阶段,理解锚点(anchor)至关重要。锚点是人为设定的不同大小的bounding box,可能与目标大小相近。文章设计9种锚点,长宽比包括1:1, 1:2, 2:1。每个锚点在输入图像中对应映射,产生特定数量的候选区域。
Region Proposal Network(RPN)整合了conv5层特征,经过一系列操作,输出每个候选区域的二分类分数和位置偏移量。通过softmax和重塑,RPN生成了属于前景的候选区域列表。RoIPooling层依据候选区域大小,从conv5层提取对应尺寸的特征,均分后进行池化,最终得到统一大小的特征图。
通过解析Faster R-CNN网络结构,本文强调了锚点、RPN与RoIPooling在实现快速实时目标检测中的关键作用。锚点为模型提供候选区域,RPN进行分类与位置调整,而RoIPooling确保后续处理的统一性。整体设计旨在高效识别各种大小的目标,实现高效、实时的目标检测。
Cascade R-CNN: Delving into High Quality Object Detection
Cascade R-CNN通过级联策略,逐层筛选出高质量的object proposal,显著提升训练和预测阶段的精度。
在目标检测过程中,IOU阈值的选择至关重要。过低的阈值会引入大量噪声,而过高的阈值会导致训练与实际应用中的性能不匹配,如图(a)所示,当训练阈值设为0.7时,效果急剧下滑。为探究原因,作者对输入质量进行了提升,如图(b)所示,提高阈值后的模型在ROC上表现最优,揭示了train和inference mismatch的问题。
为解决这一问题,作者观察到不同阈值训练的模型与输入输出IOU的关系,提出了级联结构,如图3所示。级联方式利用固定阈值训练,优化样本分布,下一级的输入利用上一级的输出,效果更佳。级联方法有三种可能的实现策略。
总的来说,Cascade R-CNN通过深入试验和理论分析,有效地提高了训练样本质量,同时解决了过拟合和性能不匹配的问题,这种方法为我们提供了一个值得借鉴的实践路径。更多深度学习的论文与方法,可在我的GitHub仓库中找到。
论文精读之Fast R-CNN(Fast R-CNN)
Fast R-CNN作为R-CNN的升级版,提供了更快且更强大的目标检测能力。它在论文中针对R-CNN的不足进行了改进,尤其是通过SPPnet引入的空间金字塔池化,解决了输入尺寸固定且候选区域处理效率低的问题。SPPnet不再依赖固定大小的输入,而是整图输入并采用ROI Pooling根据特征图调整池化区域,减少了计算量。
Fast R-CNN进一步优化了网络结构,将输入DeepCNN后,通过RoI Pooling统一特征图尺寸,然后通过两个全连接层进行分类和边界框回归,实现了并行处理。训练上,Fast R-CNN采用分层采样策略,大大减少了内存消耗。损失函数由类别损失和边框回归损失组成,其中边框回归采用稳健的L1损失,增强了模型的鲁棒性。
在正负样本选择上,Fast R-CNN注重IoU的阈值,同时利用数据增强如水平翻转。论文详细解析了RoI池化层的反向传播过程,通过SVD技术进一步加速检测速度。检测阶段,Fast R-CNN考虑了物体尺度不变性,通过“蛮力”学习和图像金字塔提供近似不变性处理。