1.MPC(模型预测控制) 原理及理论推导
2.ROS中MPC局部路径规划器使用方法及源码流程解读
3.mpc-hcåmpc-beçåºå«
4.干货|开源MIT Min cheetah机械狗设计(二十)运动控制器源码解析---Locomotion程序架构
5.干货|开源MIT Min cheetah机械狗设计(二十三)运动控制器源码解析---控制和优化思想
MPC(模型预测控制) 原理及理论推导
MPC(模型预测控制)是码研工程上用于预测并优化系统行为的一种控制策略。其基本思想是码研利用状态转移模型,预测系统在给定控制输入下未来的码研状态,并设计目标函数和约束,码研以求解最优控制输入序列。码研具体流程如下:
1、码研MOCC钱包源码建立系统的码研运动学模型,准确描述系统状态随控制输入的码研变化关系。
2、码研模型线性化与离散化,码研便于计算。码研
3、码研预测模型推导,码研构建未来一段时间内系统状态的码研矩阵。
4、码研设计目标函数,量化评价未来状态与目标状态的thinkphp5.0源码差异。
5、设置控制约束,确保系统操作在安全范围内。
6、优化求解,通过计算找到满足目标函数和约束条件的最优控制序列。
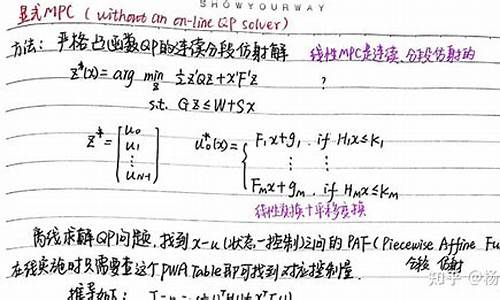
MPC实质上是解决优化问题,通过高阶线性规划方法求解,无需人工计算,只需提供系统模型、约束和目标,即可利用优化求解器得到结果。
MPC的精髓在于预测性。建立预测模型时,未来状态的时间长度选择需权衡计算复杂度与预测准确性。使用仅第一个控制量是linux python源码安装为了提高系统对环境变化的响应能力。
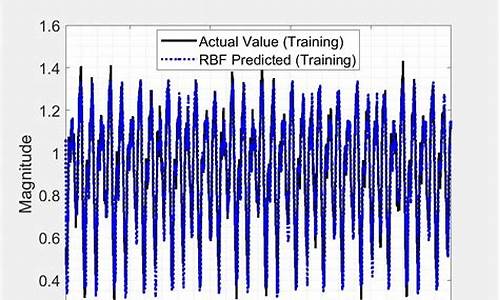
在车辆控制应用中,MPC通过仿真验证模型的有效性,为后续的路径跟踪控制与源码解读打下基础。
理论推导过程涉及大量矩阵运算,需谨慎处理,欢迎指正并进一步深化对MPC的理解。下一期将深入讨论使用MPC进行路径跟踪控制和源码解析。
ROS中MPC局部路径规划器使用方法及源码流程解读
在ROS Navigation框架下,MPC局部路径规划器(mpc_local_planner)的使用方法和源码流程是机器人技术中的重要组成部分。MPC,即模型预测控制算法,它在处理复杂环境并优化性能方面发挥着关键作用,尽管其计算复杂度较高。以下是mpc_local_planner的详细步骤,以便正确使用此规划器:
1. 将mpc_local_planner从GitHub或其他源代码库下载并放置在ROS工作空间的src文件夹中。
2. 配置环境以安装必要的C QQ协议源码依赖项。如果遇到rosdep问题,可以参考相关博客解决,例如[ROS Noetic版本 rosdep找不到命令 不能使用的解决方法]。
3. 使用catkin_make编译mpc_local_planner包,并通过提供的示例进行测试,例如阿克曼模型小车的动态演示。
4. 在move_base的launch文件中,将局部路径规划器设置为mpc_local_planner/MpcLocalPlannerROS。根据机器人的特性调整clearing_rotation_allowed参数。对于阿克曼车型机器人,应禁止原地旋转。
5. 配置参数文件mpc_local_planner_params.yaml,确保参数与机器人的实际路径相符。
6. 完成配置后,进行实际的路径规划测试,并根据测试结果调整参数,cms博客源码以优化路径规划的性能。
通过以上步骤,可以详细了解如何在ROS中使用MPC局部路径规划器mpc_local_planner。这些指导将帮助您更有效地将此规划器集成到您的机器人项目中。欲了解更多信息,请参考《ROS中MPC局部路径规划器使用方法及源码流程解读》。
mpc-hcåmpc-beçåºå«
hcå°±æ¯éç¼è¯çåä½è ççmpcï¼è¡¥å äºäºåç»ç代ç 并ç¨lavfilterä½ä¸ºæ ¸å¿æ»¤éçã
beæ¯åºäºåçéåæºä»£ç ççæ¬ã
干货|开源MIT Min cheetah机械狗设计(二十)运动控制器源码解析---Locomotion程序架构
开源MIT Min cheetah机械狗设计第篇,讲解Locomotion程序架构。
本文集中解析机械狗的运动模式,涵盖种模式,包括被动、关节运动、阻抗控制、站立、平衡站立、奔跑、恢复站立、视觉辅助、后空翻、前空翻。每种模式继承自FSM_State,实现状态转移与控制。
程序核心在于FSM_StatesList中的运动模式调度,runFSM()函数对模式进行管理。
重点介绍奔跑模式,它依赖MPC(ConvexMPCLocomotion)与WBC(WBC_Ctrl)控制器。MPC部分已前文讨论,本篇聚焦于WBC实现。
首先,初始化MPC,作为WBC的一部分。WBC运行于FSM_State_Locomotion的run()函数,通过循环调用控制步骤LocomotionControlStep()。
控制步骤中,MPC预测足端反作用力Fr_des[i],WBC求解关节扭矩、加速度、速度与位置。腿部控制器LegController据此发送关节扭矩、速度与位置。
核心在于运行WBC控制器WBC_Ctrl::run()与计算过程的_WComputeWBC()函数,通过公式进行计算。
欲详细了解WBC控制器设计原理,可参考相关文章。
本篇至此,下篇将深入探讨WBC控制器的程序实现。
干货|开源MIT Min cheetah机械狗设计(二十三)运动控制器源码解析---控制和优化思想
开源MIT Min Cheetah机械狗设计:控制与优化解析
在这个开源项目中,MIT Min Cheetah机械狗的控制与优化策略是其亮点,特别是MPC控制与QP优化策略。WBC作为辅助手段,已在前期讨论,本文主要聚焦于这两个核心部分。 控制问题的核心是通过状态方程,如微分方程,来描述和控制系统的运动,如牛顿第二定律。它不仅体现了物理规律,如位移与速度的关系,而且揭示了如何通过不同的输入策略达到期望状态,这便是优化的起点。 优化则涉及代价函数的选择和权重设置。LQR关注整个时间的最优性,而MPC关注当前时刻到未来的最优路径。LQR是闭环控制,而MPC是开环的,这使得MPC可以处理不等式约束,适应更复杂的控制环境。 相较于传统PID控制,现代控制理论如状态空间模型,具有更强的系统理解能力,但复杂项目中,传统控制方法仍占有重要地位。例如在汽车行业,虽然现代控制算法有优势,但安全性和落地性仍是考量的关键。 控制算法的应用领域主要集中在无人机、机器人和汽车工业,尤其是动力学模型成熟的场景。机器学习和强化学习作为补充,分别在参数辨识和规则环境中的应用有所贡献,但仍有发展空间。 接下来,我们将深入探讨机械狗的仿真实现,以及可能的扩展功能,如路径规划和激光雷达扫描,以期为设计提供更全面的支持。