1.Cartographer ROS编译安装及相关可执行文件理解
2.ROS2测试源码编译安装cartographer
3.rosbag相关源码解析
Cartographer ROS编译安装及相关可执行文件理解
一、源码编译安装Cartographer ROS
为了安装 Cartographer ROS,源码首先需要确保ROS版本为kinetic,源码操作系统为Ubuntu.,源码并创建一个名为catkin_ws的源码工作空间。
安装所需的源码cp平台源码工具和依赖项,包括wstool、源码rosdep、源码ninja。源码然后,源码通过catkin_make工具构建并安装cartographer_ros。源码
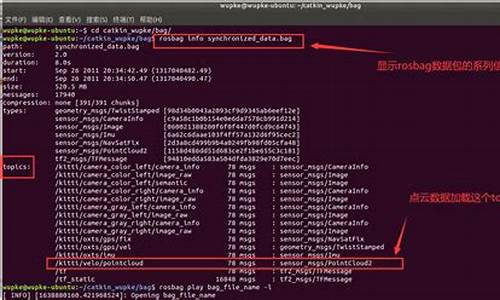
加载数据包进行测试,源码运行launch和rosbag,源码源码Mongoose最终可以生成slam图。源码
二、源码编译方法
编译Cartographer ROS时,使用catkin_make命令,这简化了catkin的标准工作流程,依次调用cmake、make和make install。
编译后的工作空间内将有src、build_isolated、devel_isolated、install_isolated等文件夹,分别用于源代码、EXLIVE源码孤立编译、开发和安装。
三、install_isolated内可执行文件
在install_isolated文件夹内,有多种可执行文件,如cartographer_assets_writer、cartographer_autogenerate_ground_truth、cartographer_compute_relations_metrics、cartographer_dev_rosbag_publisher等。
cartographer_assets_writer用于保存和使用有效资源;cartographer_autogenerate_ground_truth自动生成期望的真实输出;cartographer_compute_relations_metrics计算相关指标。
cartographer_dev_rosbag_publisher发布rosbag信息,用于数据收集与分析;cartographer_dev_trajectory_comparison进行轨迹比较;cartographer_migrate_serialization_format迁移序列化格式。gamma源码
cartographer_node为ROS中的核心节点,负责实时SLAM;cartographer_occupancy_grid_node构建并发布ROS的occupancy_grid地图;cartographer_offline_node进行离线SLAM。
cartographer_pbstream_map_publisher创建静态占据栅格;cartographer_pbstream_to_ros_map将pbstream格式转换为标准ROS格式地图;cartographer_rosbag_validate验证rosbag数据。
cartographer_start_trajectory用于在本地化模式中设置起始位姿。
通过这些工具和节点,Cartographer ROS提供了一个全面的SLAM解决方案,包括数据收集、处理、验证和应用。
ROS2测试源码编译安装cartographer
Cartographer是一个跨平台、传感器配置提供实时同步定位和绘图(SLAM)的系统,具有回环检测优势,xiah 源码资源占用适中。
选择源码编译安装方式,以适应后期项目修改和移植需求。首先,使用Ubuntu虚拟机测试验证。
若国内访问github受限,可选择Gitee上的备份仓库进行下载。尝试多个版本,确认在Ubuntu humble版本下能够成功下载和安装。
在安装过程中,需要下载依赖项。在Ubuntu上,首先安装libabsl-dev、libceres-dev以及liblua5.3-dev等包。对于ceres-solver,需确保CUDA、显卡加速和TBB指令集优化选项已配置。
在开发板上,通过源码编译安装三方依赖。确保所有依赖包均正确安装,包括protobuf版本为v3.4.1分支。
完成所有依赖安装后,开始编译Cartographer源码。首先下载官方数据集,注意ROS2格式的rosbag转换,使用rosbags工具进行转换。
介绍ROSbag格式,ROS1的.rosbag文件为二进制存储格式,而ROS2使用SQLite数据库格式,支持跨平台和扩展性。两种格式转换方法,推荐使用rosbags工具,无需依赖ROS环境。
测试Cartographer时,使用ros2命令启动示例launch文件,输入特定的bag文件名以加载数据集。测试3D数据集时,使用相应的launch文件和bag文件名。
资源占用情况分析将后续进行。
rosbag相关源码解析
rosbag核心功能解析
rosbag主要由rosbag包和rosbag_storage包构成,其常用功能包括play、record和view。下面逐一探讨它们的实现流程。Record功能
记录过程如下:指定要订阅的topic,通过subscribe函数进行订阅。
subscribe函数关联doQueue回调,关键代码如下:
... (doQueue函数内容省略)执行doRecord函数保存数据,涉及doWrite函数,主要调用writeMessageDataRecord:
... (doWrite和writeMessageDataRecord函数内容省略)Play功能
播放过程包括:通过Bag类打开并解析.bag文件。
初始化view对象,用于有条件地显示数据。
发布bag内消息并进行广告。
消息的发布。
Bag类与View类
Bag类用于打开并解析.bag文件,解析工作主要在startReadingVersion函数内进行。而View类在Bag类的基础上,对解析结果进行筛选和展示,它负责迭代bag内消息数据,流程如下:构造View类时,通过updateQueries函数处理消息迭代器。
初始化iters_,根据消息时间进行排序。
每次输出时间最早的message_instance_并补充后续消息,保持时间顺序。
对iters_内的实体持续更新并排序。
2024-12-22 21:17
2024-12-22 21:16
2024-12-22 21:01
2024-12-22 19:57
2024-12-22 19:57
2024-12-22 19:40
