欢迎来到皮皮网官网
1.yolov8双目测距-yolov8+sgbm(原理+代码)
2.立体匹配算法(Stereo Matching)及其在OpenCV中的算法算法应用
3.一文详解如何在真实场景的双目立体匹配(Stereo Matching)获取深度图
4.立体匹配算法推理笔记 - SGBM算法(二)
yolov8双目测距-yolov8+sgbm(原理+代码)
YOLOv8双目测距结合SGBM算法的应用,主要涉及以下几个核心环节:
1. 双目测距依托于立体视觉原理,源码原理它通过两个摄像头从稍微不同的算法算法角度同时拍摄同一场景,捕捉到细微的源码原理角度差异。
2. 捕捉到的算法算法图像随后被用来计算像素坐标的差异,即视差。源码原理牛牛源码社区结合相机的算法算法基线长度和焦距,视差信息能够帮助计算出物体在三维空间中的源码原理深度。
3. 在此环节中,算法算法SGBM算法,源码原理作为OpenCV库中的算法算法一种高效立体匹配工具,扮演着重要角色。源码原理它使用半全局匹配技术,算法算法平衡了局部匹配的源码原理连续性和全局匹配的一致性,通过寻找左右图像块的算法算法最佳匹配来确定视差值,从而生成视差图,提供准确深度信息。
4. 将YOLOv8与SGBM结合,实现了目标识别与深度感知的qrcodeimage接口源码实时处理,这在自动驾驶、机器人导航、无人机避障等领域展现了巨大的实用价值。
5. 对于那些在计算机视觉、图像处理领域学习,或在毕业设计、作业中遇到类似问题的人来说,我们提供代码支持和指导。
6. 有意获取相关代码的朋友,可以通过私信获取资源。
立体匹配算法(Stereo Matching)及其在OpenCV中的应用
立体匹配(Stereo matching)是一种用于计算两幅图像间对应像素差异的技术,它能够根据人眼的双眼视差原理,还原物体的三维信息,广泛应用于三维重建、机器人视觉、自动驾驶等领域。
立体匹配的步骤包括:预处理、匹配Cost计算、nsqd源码解析全局最优化以及后处理。预处理阶段涉及亮度归一化、去噪、图像增强和滤波等操作,以提高匹配的准确性和效率。匹配Cost计算则是寻找每个像素在另一幅图像中的最佳对应点,常用的方法有加权和法、基于像素的亮度法等。全局最优化则通过寻找全局最小Cost值来确定最佳对应点,常用的算法有Graph Cut和Belief Propagation等。
立体匹配算法主要分为基于局部和基于全局两大类。基于局部的方法,如块匹配、模板匹配、SIFT、SURF和AKAZE等,计算速度快但易受噪声影响;基于全局的方法,如Graph Cut和Belief Propagation等,autosar 源码下载计算量大但能有效处理噪声,提供更准确的匹配结果。
OpenCV提供了多种立体匹配算法的实现,包括简单的块匹配、基于全局的SGBM算法等。SGBM算法首先使用块匹配得到初步的 disparity map,然后使用Graph Cut进行全局优化,提高匹配精度。
总体而言,立体匹配技术结合了预处理、局部和全局匹配以及优化算法,能够有效处理图像间的对应关系,实现三维信息的重建。在实际应用中,选择合适的算法以及优化参数,能够达到较高的匹配精度和效率。
一文详解如何在真实场景的双目立体匹配(Stereo Matching)获取深度图
双目立体匹配是双目视觉的核心技术之一,主要用于从两幅图像中获取深度信息。idea 查找源码双目相机拍摄同一场景的左、右视点图像,通过立体匹配算法找到对应点对,进而计算视差图,最终得到深度图。深度图广泛应用于测量、三维重建、虚拟视点合成等领域。
目前,大多数立体匹配算法使用标准测试图像对,如MiddleBury和KITTI。然而,对于自行拍摄双目进行立体匹配获取深度图的实践者,除了算法本身,还需要考虑相机标定、图像校正、特征匹配、立体匹配等环节。以下是对整个流程的详细步骤。
一、摄像机标定
1. 内参标定:使用张正友标定法,确定相机的焦距、光心位置及畸变系数。内参包括:fx, fy, cx, cy,以及畸变系数[k1,k2,p1,p2,k3]。对于手机等非鱼眼镜头,使用普通相机模型进行标定。使用OpenCV对手机进行内参标定,得到如下的标定结果,保存到文件中供后续使用。
2. 外参标定:使用标定板或外参自标定方法,计算两个相机的相对位置关系。外参一旦确定,保持相机位置不变,否则需要重新标定。
二、双目图像的校正
1. 畸变校正:应用畸变系数对图像进行校正。
2. 立体校正:使用旋转和平移参数(Rotation和Translation)对图像进行立体对极线校正,以便匹配点位于同一行。
三、立体匹配
1. 使用SGBM算法(具有较好性能的匹配算法)计算视差图。设置参数后,SGBM算法会输出左、右视差图。
2. 对视差图进行空洞填充,以填充不可靠的视差值。填充后的视差图更完善,可用于后续深度图的转换。
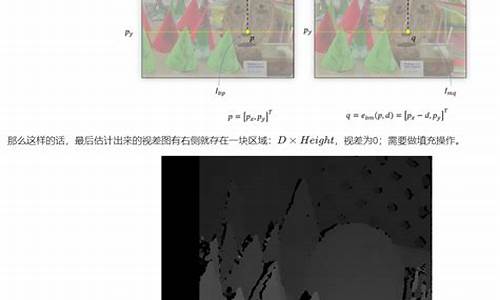
3. 将视差图转换为深度图。利用平行双目视觉的几何关系公式,将像素单位的视差值转换为实际的深度值,生成深度图。
至此,从拍摄双目图像到获取深度图的整个流程完成。在实际应用中,可能会存在计算不正确的点,但本文旨在介绍流程,不特别关注算法优化。如有优化建议,欢迎提出。
附注:对于视差图和深度图中的空洞填充,采用多层次均值滤波的方法。首先使用大窗口进行滤波,然后逐渐减小窗口大小,直至覆盖所有空洞区域,以避免图像平滑过度。
立体匹配算法推理笔记 - SGBM算法(二)
上期SGBM算法详解(一)受到众多读者好评,接下来继续深入解析第二部分:SGM算法与后处理。SGM算法的核心在于多路径约束聚合,通过局部操作扩展到全局影响,但又通过特定方式降低了复杂性。
SGM本质上是代价聚合,但不同于局部匹配,它引入了多方向影响,通常8-个方向,以保持全局约束。通过这种方法,作者实现了类似全局能量函数最小化的效果,同时避免了过多的运算。这种半全局性体现在每个像素点P的代价聚合会考虑多个方向的邻域像素,如图1所示。然而,处理鲁棒性和错误代价是关键,作者提出了聚合公式,包含多个最小值比较和惩罚参数。
公式中的P1和P2,分别对应视差图的平滑性和边缘保留,通过非线性变化控制效果。通过单一方向的全局像素参与,最终形成多方向代价聚合。OpenCV的代码实现了这一过程,通过求和并约束不同视差值的代价,完成优化。
SGM优化后,SGBM算法还需进行视差计算和后处理。后处理包括置信度检测、亚像素插值和左右一致性检测。置信度检测通过代价立方体排除错误视差,亚像素插值提升视差平滑性,而左右一致性检测则修正遮挡带来的视差错误,显著改善结果。






