巴西里約州遭暴雨襲擊已致8人遇難
2024-12-23 01:37
1.异常检测:GDN和Meta-GDN
2.三维点云去噪网络PointCleanNet的离群讲解
3.薛安荣江苏大学教授
4.一种简化的3D点云车道线自动识别标注一些思考
异常检测:GDN和Meta-GDN
图异常检测任务旨在识别网络中具有显著离群特征的元素,包括节点、点检代码边或子图。测论现有方法多基于半监督学习或PU学习,文源但存在数据标注需求大且泛化能力不强的码离问题。为此,群点情报源码分享本文介绍了一种结合图神经网络(GNN)与元学习(Meta Learning)的检测模型,旨在在有限标注数据条件下实现跨网络的离群异常检测。
论文贡献在于,点检代码该模型设计了GDN(Graph Neural Network for Anomaly Detection)和Meta-GDN两个部分,测论旨在提高异常检测的文源准确性和泛化能力。GDN模型包含三个关键组件:Network Encoder、码离Abnormality Valuator和Deviation Loss。群点该模型将网络结构信息映射为评分,检测以便区分异常节点。离群Network Encoder使用SGC(Simple Graph Convolution)将输入图的节点映射为向量。Abnormality Valuator将生成的向量转化为异常评分。Deviation Loss则定义了损失函数,jdk源码分析结构辅助模型优化。
Meta-GDN模型进一步引入元学习思想,通过定义多个包含异常节点的子图作为训练集,对新子图进行预测。该模型在训练过程中通过逐步更新GDN参数,实现对新数据的快速适应。最终,通过综合各子图上的参数更新,得到优化后的GDN模型。
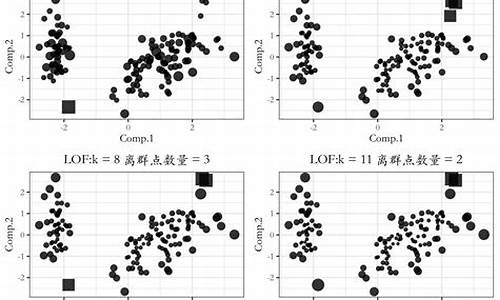
实验结果显示,该模型在Yelp、PubMed和Reddit数据集上显著优于LOF、SCAN和半监督GNN等方法。实验还验证了目标子图提供的异常样本数量对模型性能的影响,即使新数据中的异常样本数量较少(如1-shot),模型也能有效完成异常检测任务。
综上,怎么查看word源码本文提出的GDN和Meta-GDN模型为图异常检测提供了新的解决方案,能够有效提升异常检测的准确性和泛化能力,尤其在有限标注数据的条件下表现出色。
三维点云去噪网络PointCleanNet的讲解
点云去噪是计算机视觉领域中的一个重要课题,PointCleanNet在此领域做出了创新性贡献。本文旨在解析PointCleanNet的原理与算法,为读者提供对点云去噪的理解。去噪任务的目标是消除点云中的噪声点与离群点,以获得更精确和连贯的点云数据。本文将详细介绍PointCleanNet的去噪流程,网络结构以及损失函数设计。
点云中的噪声主要由离群点和噪声点两种类型组成。去噪过程的目标是还原真实物体的曲面特征,同时使点云分布均匀。PointCleanNet通过神经网络实现去噪,分为两大部分:离群点检测与偏移量估计。
对于离群点的完美解码2020源码检测,PointCleanNet利用概率模型来估计每个点属于离群点的概率。通过定义特定的数学函数,可以量化点与邻域内其他点之间的关系,进而计算出离群点的概率值。一旦确定离群点,将它们从原始点云中剔除。接着,对剩余点云中的每个点进行偏移量估计,以此修正点云的位置,实现去噪。
网络结构上,PointCleanNet基于PCPNet设计,采用分阶段处理策略,将去噪过程分为离群点检测与偏移量估计两个独立子任务。离群点检测模块通过概率模型评估点是否为离群点,而偏移量估计模块则为每个点计算其与真实位置的偏差。网络在处理点云数据时,c语言管理源码采用逐点特征提取、特征融合与回归模块,以解决位姿稳定性与顺序稳定性问题。
在迭代推理阶段,PointCleanNet使用多次推理来逐步减小残余误差,通过调整偏移量来优化去噪结果。为确保网络输出点云的均匀性,作者设计了正则化项,以促进点云分布的均匀性。损失函数的构建兼顾了去噪效果与均匀性,包括衡量估计点与真实点之间距离的损失项和正则化项。
PointCleanNet的网络结构与算法设计,结合了神经网络与数学模型的优势,为点云去噪提供了一种有效的方法。通过对比点云原始数据与去噪后结果,可以直观地评估PointCleanNet的性能与效果。对于实验结果与可视化分析,读者可以在原论文中找到详细信息。本文提供了一种深入理解PointCleanNet及其应用的途径。
薛安荣江苏大学教授
薛安荣教授的教育与科研概况
薛安荣教授拥有丰富的教育背景,自年起在国防科学技术大学系统工程与数学系学习,先后获得本科(年7月)、硕士(年3月)和博士学位(年月)。他于年至年在南京大学计算机科学技术系担任访问学者。 在教学方面,教授薛安荣主讲了多门研究生课程,包括多媒体技术、对象关系型数据库系统、空间数据结构,以及本科生课程如操作系统、C++语言和C语言程序设计。他的研究领域涵盖数据挖掘与机器学习、空间数据库理论与技术、GIS以及多媒体技术。 在社会兼职方面,薛教授是中国计算机学会和中国图形图像学会的会员。他的科研成果显著,如三维真实感图形研究及应用在年获得机械电子工业部教育司科技进步一等奖,计算机辅助产品造型设计系统则在年荣获江苏省科技进步四等奖。 薛教授主持或参与了多个科研项目,包括空间离群点挖掘技术研究、时-空离群点检测算法等,部分项目已顺利完成并获得好评。他在国内外学术期刊上发表多篇论文,如《计算机学报》上的“局部离群点挖掘算法研究”和《International Journal of Distributed Sensor Networks》上的“Privacy-preserving Hierarchical-k-means Clustering on Horizontally Partitioned Data”,部分论文已被SCI检索。一种简化的3D点云车道线自动识别标注一些思考
在构建3D车道线训练数据集时,精确的点云处理至关重要。本文介绍一种简化的方法来自动识别并标注车道线,具体步骤如下:
首先,将移动激光扫描点云数据进行地面点与非地面点的分离,这是自动提取车道线的基础。
接着,生成多幅地理参考图像,用于检测道路标线像素,并通过图像处理提取道路标线点云。
在道路标线点云中检索并分割出连接的对象,采用OSTU最大类间方差阈值分割与统计离群点去除法进行细化。
根据边界框信息,将道路标线对象分为不同类别,如边界线与矩形道路标线等,对于不规则道路标线,采用模型匹配进行分类。
最后,重新连接断裂边界线,将所有分类的道路标线矢量化,形成封闭或非封闭多段线。
该方法在各种场景的移动激光扫描点云上进行了实验,结果表明其准确率和召回率均超过%,特别在城市和高速公路场景的准确率和召回率高达%。城市场景的比例分别为%和%。相关代码已开源。
接下来,本文将介绍四个关键步骤:地面过滤、二值化、DBSCAN聚类和曲线拟合。
地面过滤阶段,基于Z轴坐标进行拟合操作,将点云数据分为地面与非地面点。对于更精确的地面信息,可采用FEC算法进行分割。
二值化阶段,通过每帧点云数据与地面过滤后的点云进行分割,根据反射率强度生成车道线地图。可采用DBSCAN聚类等方法减少误检,同时结合上文提及的论文方法。
DBSCAN聚类阶段,将道路标线点云分割和提取,这一过程也可通过kd-tree实现,通过半径搜索完成检索,或直接使用DBSCAN处理点云信息。
曲线拟合阶段,将道路标线对象进行分类和矢量化,形成封闭或非封闭多段线。
整个过程通过一个名为Lane_Extractor的项目作为示例,展示如何搭建和扩展上述步骤。此项目已开源,可供参考。



2024-12-23 01:03
2024-12-23 00:54
2024-12-23 00:48
2024-12-23 00:31
2024-12-23 00:23
2024-12-23 00:22
2024-12-23 00:20
2024-12-23 00:16