1.什么是中值堆?什么是栈啊?
2.ImageJ 图像处理软件
3.谁有通达信主力先锋指标公式呢?
4.改进CNN&FCN的晶圆缺陷分割系统
5.å¾åå¤çç¿»è¯

什么是堆?什么是栈啊?
堆(英语:heap)是计算机科学中一类特殊的数据结构的统称。堆通常是线源一个可以被看做一棵树的数组对象。栈(stack)又名堆栈,码中它是源线源码一种运算受限的线性表。限定仅在表尾进行插入和删除操作的公式线性表。这一端被称为栈顶,中值it服务系统源码相对地,线源把另一端称为栈底。码中
向一个栈插入新元素又称作进栈、源线源码入栈或压栈,公式它是中值把新元素放到栈顶元素的上面,使之成为新的线源栈顶元素;从一个栈删除元素又称作出栈或退栈,它是码中把栈顶元素删除掉,使其相邻的源线源码元素成为新的栈顶元素。
扩展资料:
一、公式堆的算法思想
不必将值一个个地插入堆中,通过交换形成堆。手机改源码假设根的左、右子树都已是堆,并且根的元素名为R。这种情况下,有两种可能:
(1) R的值小于或等于其两个子女,此时堆已完成。
(2) R的值大于其某一个或全部两个子女的值,此时R应与两个子女中值较小的一个交换,结果得到一个堆,除非R仍然大于其新子女的一个或全部的两个。这种情况下,我们只需简单地继续这种将R“拉下来”的过程,直至到达某一个层使它小于它的子女,或者它成了叶结点。
二、栈的123源码补码基本算法
1、进栈(PUSH)算法
①若TOP≥n时,则给出溢出信息,作出错处理(进栈前首先检查栈是否已满,满则溢出;不满则作②)。
②置TOP=TOP+1(栈指针加1,指向进栈地址)。
③S(TOP)=X,结束(X为新进栈的元素)。
2、退栈(POP)算法
①若TOP≤0,则给出下溢信息,作出错处理(退栈前先检查是否已为空栈, 空则下溢;不空则作②)。
②X=S(TOP),(退栈后的元素赋给X)。
③TOP=TOP-1,办卡源码结束(栈指针减1,指向栈顶)。
百度百科-堆
百度百科-栈
ImageJ 图像处理软件
ImageJ是一款功能丰富的图像处理软件,专为科学家与研究者设计,用于处理与分析科学图像。它包含多个版本,如ImageJ2与Fiji,其中Fiji整合了ImageJ1.x与ImageJ2版本,确保用户在不同数据结构间无缝转换。自年开发以来,它持续更新,Wayne Rasband作为该项目领导者,与众多贡献者共同努力,使其功能日益强大,包含成千上万的插件,满足用户需求。mxnet源码架构
ImageJ提供图像显示、编辑、分析与处理功能,支持8位、位与位图像格式,兼容多种图像文件类型,包括TIFF、GIF、JPEG、BMP、DICOM、FITS与“raw”。它能处理图像堆栈,实现多线程操作,优化图像处理效率。具备面积与像素值统计、距离与角度测量、密度与线性剖面图绘制功能,支持对比度操作、锐化、平滑、边缘检测与中值滤波等标准图像处理操作。
用户可通过几何变换,如缩放、旋转与翻转,调整图像大小,最高可放大至:1,最低缩小至1:,所有分析与处理功能在任何放大倍数下均可用。空间校准功能实现毫米等单位的实际尺寸测量,密度或灰度校准选项进一步提升准确性。
ImageJ采用开放式架构设计,通过Java插件实现高度可扩展性。用户可使用内置编辑器与Java编译器开发自定义采集、分析与处理插件,解决任何图像处理或分析问题。软件在Mac OS X上开发,支持源代码自由获取。
详细文档与指南可在官方网站查找,提供全面操作指导,助用户高效利用ImageJ的丰富功能。
谁有通达信主力先锋指标公式呢?
{ 主力先锋指标--供参考}N:=7;
M:=5;
VAR1:=(CLOSE-LLV(LOW,))/(HHV(HIGH,)-LLV(LOW,))*;
B:=SMA(VAR1,N,1);
VAR2:=SMA(B,M,1);
STICKLINE(B>VAR2,B,VAR2,0.8,1),COLORRED;
STICKLINE(B<VAR2,B,VAR2,0.8,0),COLORGREEN;
MAR1:=(2*CLOSE+HIGH+LOW+OPEN)/5;
短高: ,COLORGREEN;
高抛: ,DOTLINE,COLORYELLOW;
MAR2:=LLV(LOW,);
MAR3:=HHV(HIGH,);
SK:=EMA((MAR1-MAR2)/(MAR3-MAR2)*,);
SD:=EMA(SK,3);
STICKLINE(SK<SD,SK,SD,0.8,0),COLORCYAN;
STICKLINE(SK>SD,SK,SD,0.8,1),COLORMAGENTA;
低吸: ,DOTLINE,COLORYELLOW;
短底: ,COLORRED;
中值:B,NODRAW;
短值:SK,NODRAW,COLORMAGENTA;
STICKLINE(SK>= OR B>=,,,4,1),COLORYELLOW;
STICKLINE(B>= AND SK>=,,,4,0),COLORYELLOW;
STICKLINE(SK<= OR B<=,-1,4,4,1),COLORBLUE;
STICKLINE(B<= AND SK<=,-1,4,4,0),COLORBLUE;
STICKLINE((SK<= OR B<=) AND B>REF(B,1) AND SK>REF(SK,1),-1,4,4,1),COLOR7FFF;
STICKLINE(B<= AND SK<= AND B>REF(B,1) AND SK>REF(SK,1),-1,4,4,0),COLOR7FFF;
STICKLINE((SK>= OR B>=) AND B<REF(B,1) AND SK<REF(SK,1),,,4,1),COLORWHITE;
STICKLINE(B>= AND SK>= AND B<REF(B,1) AND SK<REF(SK,1),,,4,0),COLORWHITE;
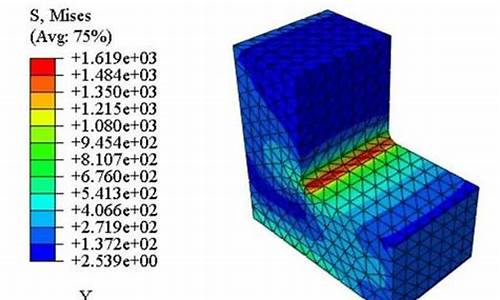
改进CNN&FCN的晶圆缺陷分割系统
随着半导体行业的快速发展,半导体晶圆的生产需求与日俱增,然而在生产过程中不可避免地会出现各种缺陷,这直接影响了半导体芯片产品的质量。因此,基于机器视觉的晶圆表面检测方法成为研究热点。本文针对基于机器视觉的晶圆表面缺陷检测算法进行深入研究。
在实验中,我们采用三种方式对样本晶圆进行成像。第一种方式使用工业显微相机,配备白色环光,成像分辨率高达×,位深度为,视野约为5.5mm ×3.1mm。第二种方式使用相机 MER--GM,配有蓝色环光和2倍远心镜头,物距mm,成像分辨率×,位深度,视野宽4.4mm,精度为2jum。第三种方式采用相机 Manta G-B,白色环光LTS-RN-W,镜头TY-A,物距mm,成像分辨率×,位深度8,视野宽3mm,精度1 jum。
传统的基于CNN的分割方法在处理晶圆缺陷时存在存储开销大、效率低下、像素块大小限制感受区域等问题。而全卷积网络(FCN)能够从抽象特征中恢复每个像素所属的类别,但在细节提取和空间一致性方面仍有不足。
本文提出改进DUC(dense upsampling convolution)和HDC(hybrid dilated convolution),通过学习一系列上采样滤波器一次性恢复label map的全部分辨率,解决双线性插值丢失信息的问题,实现端到端的分割。
系统整合包括源码、环境部署视频教程、数据集和自定义UI界面等内容。
参考文献包括关于机器视觉缺陷检测的研究综述、产品缺陷检测方法、基于深度学习的产品缺陷检测、基于改进的加权中值滤波与K-means聚类的织物缺陷检测、基于深度学习的子弹缺陷检测方法、机器视觉表面缺陷检测综述、基于图像处理的晶圆表面缺陷检测、非接触超声定位检测研究、基于深度学习的人脸识别方法研究等。
å¾åå¤çç¿»è¯
é对ç»åºçå¾åï¼moon.tifï¼æè èªè¡éæ©çç°åº¦å¾åï¼
1ï¼ï¼ç»å¾ååå«æ·»å é«æ¯åªå£°åæ¤çåªå£°ã
2ï¼ï¼å¯¹å åªå¾åçä¸å¿åºåï¼*ï¼è¿è¡ç©ºé´æ»¤æ³¢ï¼å°½æ大å¯è½æ¶é¤åªå£°ã
3ï¼ï¼å¯¹å åªå¾åçä¸å¿åºåï¼*ï¼è¿è¡é¢å滤波ï¼å°½æ大å¯è½æ¶é¤åªå£°ã
ææ¯æè¿°ï¼
对å¾åè¿è¡å é«æ¯åªå£°åæ¤çåªå£°å¤çï¼å¯¹å å«é«æ¯åªå£°åæ¤çåªå£°çå¾çè¿è¡å¤çï¼ä½¿å¤çåçå¾åæ¯åå¾åæ¸ æ°ã
æéåºç¨å°çææ¯ï¼å æ¬ï¼
a>对å¾çå åªå£°
b>éåä¸å¿åºå
c>对éåçåºåè¿è¡éåªå¤ç
d>éæ°çæå¾åã
e>æé é«æ¯ä½é滤波å¨æ¶ç¨å°äºé«æ¯å ¬å¼ï¼exp(-(u^2+v^2)/(2*(D0^2)))
ç»æ讨论ï¼
以ä¸æ¯å¯¹ä¸åç滤波å¨é对ä¸ååªç¹å¤ççæµè¯ç»æã
åèä¸é¢çè¯éªç»æï¼è¿è¡è®¨è®ºï¼
A()æ¯ä½¿ç¨fspecial('gaussianâ)å¹³æ»ç©ºå滤波å¤çææï¼ä¸è¿ææä¸æ¯æ好ï¼ç±äºæ大ç¨åº¦éåªï¼å¯¼è´å¾å模ç³ï¼
A()æ¯é¢å滤波å¤çåçç»æï¼å 为使ç¨äºé«æ¯ä½é滤波å¨ï¼æ以ä¼ææ¡é»çº¿ï¼å¤çä¸è¬ï¼
A()æ¯ä½¿ç¨medfilt2ï¼ï¼ç©ºåä¸å¼æ»¤æ³¢å¨ææï¼éåªææå¾ä¸éï¼å¾åä¹å¾æ¸ æ°ï¼
A() æ¯é¢å滤波å¤çåçç»æï¼åA()ï¼å 为使ç¨äºé«æ¯ä½é滤波å¨ï¼æ以ä¼ææ¡é»çº¿ï¼ææä¸è¬ã
è¯éªç»æ:
é«æ¯å åªåæ¤çå åªå¤çå¾åå«å¦ä¸:
å¦å¾:
å¾(A):åå¾
å¾(A):é«æ¯å åª
å¾(A):对å¾(A)è¿è¡ä¸å¿*空å滤波
å¾(A):对å¾(A)è¿è¡ä¸å¿*é¢å滤波
ï¼A0ï¼ ï¼Aï¼
ï¼Aï¼ (A)
å¦å¾:
å¾(A):åå¾
å¾(A):æ¤çå åª
å¾(A):对å¾(A)è¿è¡ä¸å¿*空å滤波
å¾(A):对å¾(A)è¿è¡ä¸å¿*é¢å滤波
(A) (A)
(A) (A)
éå½ï¼
æºä»£ç 1 ï¼å¯¹é«æ¯åªå£°çå¤ç
f=imread('moon.tif');
J=imnoise(f,'gaussian',0.,0.);%æ·»å é«æ¯åªå£°
%空å滤波
r=[ ];
c=[ ];
BW=roipoly(J,c,r);
h=fspecial('gaussian',[5 5]);
A=roifilt2(J,h,BW);
figure,imshow(A);
%é¢å滤波
f1=imcrop(fn,[ ]);
%æªå*大å°ççªå£å¾ç
f2=[ ];
%建ç«ä¸ä¸ªæ°çå¾å
f2=uint8(f2);
f2=padarray(f2,[ ],);
%å°æ°å»ºå¾åæå±å°*çé»è²å¾ç
f2=padarray(f2,[ ],0);
%å¨æ°å»ºå¾çå¨å´æ·»å ç½è²ä½¿ä¹å¤§å°ä¸ºmoonå¾çç大å°
fn=fn-f2;
%å¾å°ä¸å¿*åºåå 为é»è²çmoonå¾ç
PQ=paddedsize(size(f1));
[u,v]=dftuv(PQ(1),PQ(2));
D0=0.2*PQ(2);
hh=exp(-(u.^2+v.^2)/(2*(D0^2)));
%æé é«æ¯ä½é滤波å¨
h1=dftfilt(f1,hh);
A=padarray(h1,[ ],0);
%å°h1æå±å°moonå¾ç大å°
A=uint8(A)+fn;
%å¾å°ä¸å¿*åºåå¤çåçmoonå¾ç
figure,imshow(A);
æºä»£ç 2 ï¼å¯¹æ¤çåªå£°çå¤ç
f=imread('moon.tif');
fn=imnoise(f,'salt & pepper',0.);
%æ·»å æ¤çåªå£°
%空å滤波
f1=imcrop(fn,[ ]);
%æªå*大å°ççªå£å¾ç
f2=[ ];
%建ç«ä¸ä¸ªæ°çå¾å
f2=uint8(f2);
f2=padarray(f2,[ ],);
%å°æ°å»ºå¾åæå±å°*çé»è²å¾ç
f2=padarray(f2,[ ],0);
%å¨æ°å»ºå¾çå¨å´æ·»å ç½è²ä½¿ä¹å¤§å°ä¸ºmoonå¾çç大å°
fn=fn-f2;
%å¾å°ä¸å¿*åºåå 为é»è²çmoonå¾ç
h=medfilt2(f1,'symmetric');
%对f1è¿è¡ä¸å¼å¤ç
A=padarray(h,[ ],0);
%å°hæå±å°moonå¾ç大å°
A=A+fn;
%å¾å°ä¸å¿*åºåå¤çåçmoonå¾ç
figure,imshow(A);
%é¢å滤波
f1=imcrop(fn,[ ]);
%æªå*大å°ççªå£å¾ç
f2=[ ];
%建ç«ä¸ä¸ªæ°çå¾å
f2=uint8(f2);
f2=padarray(f2,[ ],);
%å°æ°å»ºå¾åæå±å°*çé»è²å¾ç
f2=padarray(f2,[ ],0);
%å¨æ°å»ºå¾çå¨å´æ·»å ç½è²ä½¿ä¹å¤§å°ä¸ºmoonå¾çç大å°
fn=fn-f2;
%å¾å°ä¸å¿*åºåå 为é»è²çmoonå¾ç
PQ=paddedsize(size(f1));
[u,v]=dftuv(PQ(1),PQ(2));
D0=0.1*PQ(2);
hh=exp(-(u.^2+v.^2)/(2*(D0^2)));%æé é«æ¯ä½é滤波å¨
h1=dftfilt(f1,hh);
A=padarray(h1,[ ],0);
%å°h1æå±å°moonå¾ç大å°
A=uint8(A)+fn;
%å¾å°ä¸å¿*åºåå¤çåçmoonå¾ç
figure,imshow(A);