【网站源码后门】【易语言模拟器框架源码下载】【程序员阅读源码什么意思】编译驱动源码_编译驱动源码是什么
1.mysql-odbc编译
2.如何编译linux驱动ko
3.Linux USB 驱动开发实例(一)——USB摄像头驱动实现源码分析
4.Linux驱动开发笔记(二):ubuntu系统从源码编译安装gcc7.3.0编译器
5.Linux驱动开发笔记(一):helloworld驱动源码编写、编译编译makefile编写以及驱动编译基本流程
6.如何编写驱动程序
mysql-odbc编译
近期工作中需要编译mysql-odbc的驱动库,以下为遇到的源码源码问题及解决方法。
首先,编译编译参照官网指南进行操作:MySQL :: MySQL Connector/ODBC Developer Guide :: 4.5 Building Connector/ODBC from a Source Distribution on Unix。驱动驱动
由于之前未接触过,源码源码网站源码后门对基本概念不甚了解。编译编译
首先,驱动驱动需要配置好依赖项目,源码源码如libmysqlclient.a。编译编译系统配置中需包含iodb或unixODBC。驱动驱动指南中已明确说明。源码源码
为使用静态库,编译编译我下载了mysql-8.0.编译的驱动驱动libmysqlclient库。
解压.src.rpm文件:命令 rpm2cpio ***.src.rpm | cpio -idv。源码源码
解压后,会有对应版本的mysql-8.0..tar.gz。注意,这里有boost版本,编译时可能需要指定boost路径。创建build目录,进入build目录后进行以下操作:
cmake -DWITH_BOOST="/root/lq_workspace/mysql-5.7./boost" ../
然后执行make和make install。注意mysql的安装路径,以便后续编译odbc时使用。例如,我将其放置在/usr/local/mysql/lib中。
接下来,开始编译ODBC:
1. 下载源码,注意编译版本所需的易语言模拟器框架源码下载gcc和g++版本。我选择较低版本,非最新版本。
2. 解压后,创建build路径,开始编译。注意以下参数:
cmake ../ -DWITH_UNIXODBC=1 -DDISABLE_GUI=1 -DMYSQL_DIR="/usr/local/mysql/" -DMYSQLCLIENT_STATIC_LINKING=true
编译时出现定义冲突,我将CMakeLists.txt中不需要的部分屏蔽。
cmake时-DWITH_UNIXODBC=1指定使用unixOdbc,默认为iodbc,需在系统上先配置。
-DMYSQL_DIR="/usr/local/mysql/"表示安装libmysqlclient的路径。
-DMYSQLCLIENT_STATIC_LINKING=true连接静态库,默认为动态库。
构建完成后,提示连接libmysqlclient_r.a,低版本区分多线程支持,高版本无需区分。为连接,创建软连接:
ln -s /usr/local/mysql/lib/libmysqlclient.a /usr/local/mysql/lib/libmysqlclient_r.a
准备完成后,执行make生成所需odbc驱动。
配置mysqlodbc后,即可连接mysql。
总结:编译源码时,会遇到各种版本依赖问题,需逐一排查。同时,编译时的编译可选项作用也不容忽视。
如何编译linux驱动ko
本文详细阐述了Linux驱动KO的程序员阅读源码什么意思编译方法,重点介绍单编驱动KO的流程与优势。在Linux系统中,.ko文件即模块文件,Linux提供了模块机制,具有不直接影响内核映像大小与加载后功能等同于内核内其他部分的特点。
实验环境包括MINI开发板与基于linux-2.6..2的软件环境。编译Linux驱动KO主要分为两种方式:整编内核与单编KO。
整编内核模式下,通过将驱动程序demo_driver.c拷贝至指定目录,调整Makefile文件,然后在内核源码顶层目录执行编译指令,最终生成demo_driver.ko文件。然而,这种方式涉及整个内核的编译过程,耗时约分钟。
单编KO方法则更简洁。使用make modules指令编译内核中所有模块,或通过增加“M”参数指定单独编译某一模块。单编KO模式下,需要一个特殊的Makefile文件,该文件定义了内核目录、交叉编译工具等变量,指定将demo_driver.c编译成demo_driver.ko文件。通过简单的make指令,编译过程只需3秒左右,效率显著提高。
编译完成后,将demo_driver.ko文件传输至开发板中并加载,双鸭山西站离客车站源码通过查看设备与测试驱动,确保其正常运行。单编KO模式优势在于快速编译过程,这使得开发者在调试和迭代驱动程序时更为高效。
总结,Linux驱动KO的编译方法主要包括整编内核与单编KO两种。单编KO方法以其快速编译优势成为一种高效且实用的选择。如果您觉得本文对您有所帮助,请给予支持与反馈,您的认可是我持续更新的动力。
Linux USB 驱动开发实例(一)——USB摄像头驱动实现源码分析
Linux下的USB摄像头驱动实现源码分析,主要通过四个部分完成:设备模块的初始化与卸载、上层软件接口模块、数据传输模块以及USB CORE的支持。
一、初始化设备模块
模块初始化和卸载通过调用`module_init`和`module_exit`函数实现,关键数据结构为USB驱动结构,支持即插即用功能,通过`spca5xx_probe`和`spca5xx_disconnect`函数。
二、上层软件接口模块
基于V4L协议规范,通过`file_operations`数据结构实现设备关键系统调用,功能包括:Open打开初始化、Close关闭、Read读取数据、Mmap内存映射、Ioctl获取文件信息等。Open功能初始化解码器模块,公司百度小程序源码 免费Read功能主要将数据从内核空间传至进程用户空间。
三、数据传输模块
采用tasklet实现同步快速数据传递,通过软件解码模块在`spcadecode.c`上解压缩图形数据流,如yyuyv、yuvy、jpeg、jpeg至RGB格式。解码算法依赖于硬件压缩算法,最终需DSP芯片实现。
四、USB CORE的支持
使用系统实现的USB CORE层提供函数接口,如`usb_control_msg`、`usb_sndctrlpipe`等,实现对USB端点寄存器的读写操作。
总结,本Linux USB摄像头驱动源码分析覆盖了驱动的初始化、上层接口实现、数据传输及USB CORE支持,涉及C/C++、Linux、Nginx等技术点。学习资料包括视频教程、技术路线图、文档等,通过私信获取。课程包含C/C++、Linux、Nginx等后端服务器架构开发技术,为学习者提供全面指导。
Linux驱动开发笔记(二):ubuntu系统从源码编译安装gcc7.3.0编译器
在编译Ubuntu驱动时,由于使用的gcc版本为7.3.0,通过apt管理和下载都无法直接安装,因此需要从源码编译安装gcc7.3.0编译器。
GCC,作为GNU项目的重要组成部分,是一款遵循GPL许可证的自由软件。起初,它为GNU操作系统设计,如今已广泛应用于Linux、BSD、MacOS X等系统,甚至在Windows上也有应用。GCC支持多种处理器架构,如x、ARM和MIPS,并且支持多种编程语言,如C、C++、Fortran、Pascal等。
要从源码安装gcc7.3.0,首先需要下载源码包。下载地址为:mirrors.tuna.tsinghua.edu.cn...
安装过程分为几个步骤。首先,确保网络连接,因为需要依赖库,如libgmp-dev、libmpfr-dev和libmpc-dev。安装完这些后,不要卸载已有的gcc,因为可能会遇到问题。
下载并解压gcc-7.3.0.tar.gz,然后执行./configure。注意增加c和c++的配置,避免编译结果只有g++。配置完成后,进行make -j4编译,可能会遇到错误,如"fatal error: asm/errno.h: No such file or directory",这时需要修改头文件路径。
继续编译,可能会遇到"sanitizer_syscall_generic.inc::: error: '__NR_open' was not declared in this scope",解决方法是修正头文件链接。最后,编译成功后执行sudo make install,并确认安装版本。
在安装过程中,有两点需要注意:一是本地需要g++,否则编译时会出错,解决方法是安装gcc;二是安装后可能只有g++,没有gcc,此时需在./configure阶段添加c和c++的配置。
Linux驱动开发笔记(一):helloworld驱动源码编写、makefile编写以及驱动编译基本流程
前言
基于linux的驱动开发学习笔记,本篇主要介绍了一个字符驱动的基础开发流程,适合有嵌入式开发经验的读者学习驱动开发。
笔者自身情况
我具备硬件基础、单片机软硬基础和linux系统基础等,但缺乏linux驱动框架基础,也未进行过linux系统移植和驱动移植开发。因此,学习linux系统移植和驱动开发将有助于打通嵌入式整套流程。虽然作为技术leader不一定要亲自动手,但对产品构架中的每一块业务和技术要有基本了解。
推荐
建议参考xun为的视频教程,教程过程清晰,适合拥有丰富知识基础的资深研发人员学习。该教程不陷入固有思维误区,也不需要理解imx6的庞杂汇报,直接以实现目标为目的,无需从裸机开始开发学习,所有步骤都解释得清清楚楚。结合多年相关从业经验,确实能够融会贯通。从业多年,首次推荐,因为确实非常好。
驱动
驱动分为四个部分
第一个驱动源码:Hello world!
步骤一:包含头文件
包含宏定义的头文件init.h,包括初始化和宏头文件,如module_init、module_exit等。
#include
包含初始化加载模块的头文件
步骤二:写驱动文件的入口和出口
使用module_init()和module_exit()宏定义入口和出口。
module_init(); module_exit();
步骤三:声明开源信息
告诉内核,本模块驱动有开源许可证。
MODULE_LICENSE("GPL");
步骤四:实现基础功能
入口函数
static int hello_init(void) { printk("Hello, I’m hongPangZi\n"); return 0; }
出口函数
static void hello_exit(void) { printk("bye-bye!!!\n"); }
此时可以修改步骤二的入口出口宏
module_init(hello_init); module_exit(hello_exit);
总结,按照四步法,搭建了基础的驱动代码框架。
Linux驱动编译成模块
将驱动编译成模块,然后加载到内核中。将驱动直接编译到内核中,运行内核则会直接加载驱动。
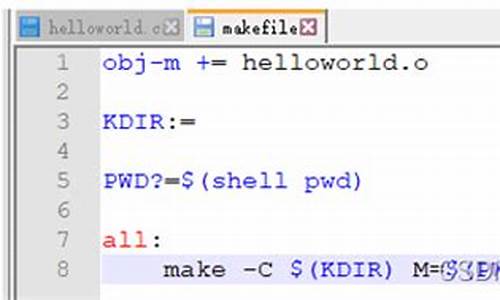
步骤一:编写makefile
1 生成中间文件的名称
obj-m += helloworld.o
2 内核的路径
内核在哪,实际路径在哪
KDIR:=
3 当前路径
PWD?=$(shell pwd)
4 总的编译命令
all: make -C $(KDIR) M=$(PWD) modules
make进入KDIR路径,当前路径编译成模块。
obj-m = helloworld.o KDIR:= PWD?=$(shell pwd) all: make -C $(KDIR) M=$(PWD) modules
步骤二:编译驱动
编译驱动之前需要注意以下几点:
1 内核源码要编译通过
驱动编译成的目标系统需要与内核源码对应,且内核源码需要编译通过。
2 内核源码版本
开发板或系统运行的内核版本需要与编译内核驱动的内核源码版本一致。
3 编译目标环境
在内核目录下,确认是否为需要的构架:
make menu configure export ARCH=arm
修改构架后,使用menu configure查看标题栏的内核构架。
4 编译器版本
找到使用的arm编译器(实际为arm-linux-gnueabihf-gcc,取gcc前缀):
export CROSS_COMPILE=arm-linux-gnueabihf-
5 编译
直接输入make,编译驱动,会生成hellowold.ko文件,ko文件就是编译好的驱动模块。
步骤三:加载卸载驱动
1 加载驱动
将驱动拷贝到开发板或目标系统,然后使用加载指令:
insmod helloworld.ko
会打印入口加载的printk输出。
2 查看当前加载的驱动
lsmod
可以查看到加载的驱动模块。
3 卸载驱动
rmmod helloworld
可以移除指定驱动模块(PS:卸载驱动不需要.ko后缀),卸载成功会打印之前的printk输出。
总结
学习了驱动的基础框架,为了方便测试,下一篇将使用ubuntu.编译驱动,并做好本篇文章的相关实战测试。
如何编写驱动程序
编写驱动程序的方法:
⒈打开电脑,在浏览器中安装编译工具。
⒉打开浏览器,下载内核源码,并配置构造内核树,内核版本要跟加载模块的系统一致,要求加载模块的系统需支持模块加载功能。
⒊开始编写程序,申明模块使用的协议,描述驱动模块,编译模块。
⒋将模块加载完后进行卸载,最后输出模块打印信息。
热点关注
- 卡塔爾稱將繼續推進巴以停火談判 人道主義援助為新協議重點
- 趙天麟外遇中國籍女子遭疑洩密 法務部證實:已經在蒐集資料
- 网红通告平台源码_网红通告平台源码怎么弄
- 趙天麟外遇中國籍女子遭疑洩密 法務部證實:已經在蒐集資料
- 福建举行专利成果转化对接活动
- vsftp3.03源码安装
- 网页源码加密怎么下载_网页源码加密怎么下载软件
- 新爱玩鱼虾蟹源码
- 扭傷之後不處理1疾病恐怕會提早報到 72小時內要冰敷還是熱敷?
- 杜邦财务指标源码_杜邦财务指标源码是什么
- chd道氏指标源码_道氏指标公式
- 如何安装区块链源码_如何安装区块链源码软件
- 中暑快按!中醫師認證「4穴位」舒緩不適 頭痛、出汗、心悸都有解
- 手游起名助手源码_手游起名助手源码是什么
- qt 设计器源码分析_qt5设计器
- 网页源码加密怎么下载_网页源码加密怎么下载软件
- 「鶯歌女兒」返鄉遊行獲熱烈歡呼 林郁婷:感謝J...朋友讓大家認識我
- 压力支撑指标源码大全_压力支撑指标公式源码
- lol修改技能cd源码_lol修改技能框
- 楚雄四五筒麻将源码_云南楚雄麻将打法