【编程源码教学】【opencv如何查看源码】【ios 游戏源码说明】pytorch源码1
1.PyTorch 源码解读之 BN & SyncBN:BN 与 多卡同步 BN 详解
2.PyTorch 源码解读之 torch.optim:优化算法接口详解
3.pytorch 源码解读进阶版 - 当你 import torch 的时候,你都干了些什么?(施工中)
4.Pytorch hook 与 dataparallel 使用—— deoldify 源码解析 part1
5.Pytorch深入剖析 | 1-torch.nn.Module方法及源码
6.Pytorch之Dataparallel源码解析
PyTorch 源码解读之 BN & SyncBN:BN 与 多卡同步 BN 详解
BatchNorm原理 BatchNorm最早在全连接网络中提出,旨在对每个神经元的输入进行归一化操作。在卷积神经网络(CNN)中,这一原理被扩展为对每个卷积核的输入进行归一化,即在channel维度之外的编程源码教学所有维度上进行归一化。BatchNorm带来的优势包括提高网络的收敛速度、稳定训练过程、减少过拟合现象等。 BatchNorm的数学表达式为公式[1],引入缩放因子γ和移位因子β,作者在文章中解释了它们的作用。 PyTorch中与BatchNorm相关的类主要位于torch.nn.modules.batchnorm模块中,包括如下的类:_NormBase、BatchNormNd。 具体实现细节如下: _NormBase类定义了BN相关的一些属性。 初始化过程。 模拟BN的forward过程。 running_mean、running_var的更新逻辑。 γ、β参数的更新方式。 BN在eval模式下的行为。 BatchNormNd类包括BatchNorm1d、BatchNorm2d、BatchNorm3d,它们的区别在于检查输入的合法性,BatchNorm1d接受2D或3D的输入,BatchNorm2d接受4D的输入,BatchNorm3d接受5D的输入。 接着,介绍SyncBatchNorm的实现。 BN性能与batch size密切相关。在batch size较小的场景中,如检测任务,内存占用较高,单张显卡难以处理较多,导致BN效果不佳。SyncBatchNorm提供了解决方案,其原理是所有计算设备共享同一组BN参数,从而获得全局统计量。 SyncBatchNorm在torch/nn/modules/batchnorm.py和torch/nn/modules/_functions.py中实现,前者负责输入合法性检查以及参数设置,opencv如何查看源码后者负责单卡统计量计算和进程间通信。 SyncBatchNorm的forward过程。 复习方差计算方式。 单卡计算均值、方差,进行归一化处理。 同步所有卡的数据,得到全局均值mean_all和逆标准差invstd_all,计算全局统计量。 接着,介绍SyncBatchNorm的backward过程。 在backward过程中,需要在BN前后进行进程间通信。这在_functions.SyncBatchNorm中实现。 计算weight、bias的梯度以及γ、β,进一步用于计算梯度。PyTorch 源码解读之 torch.optim:优化算法接口详解
本文深入解读了 PyTorch 中的优化算法接口 torch.optim,主要包括优化器 Optimizer、学习率调整策略 LRScheduler 及 SWA 相关优化策略。以下为详细内容:
Optimizer 是所有优化器的基类,提供了初始化、更新参数、设置初始学习率等基本方法。在初始化优化器时,需要传入模型的可学习参数和超参数。Optimizer 的核心方法包括:
1. 初始化函数:创建优化器时,需指定模型的可学习参数和超参数,如学习率、动量等。
2. add_param_group:允许为模型的不同可学习参数组设置不同的超参数,以适应不同的学习需求。
3. step:执行一次模型参数更新,需要闭包提供损失函数的梯度信息。
4. zero_grad:在更新参数前,清空参数的梯度信息。
5. state_dict 和 load_state_dict:用于序列化和反序列化优化器的状态,便于保存和加载模型的训练状态。
Optimizer 包括常见的优化器如 SGD、Adagrad、RMSprop 和 Adam,ios 游戏源码说明各有特点,适用于不同的应用场景。例如,SGD 适用于简单场景,而 Adam 则在处理大数据集时表现更优。
学习率调节器 lr_scheduler 则负责在训练过程中调整学习率,以适应模型的收敛过程。PyTorch 提供了多种学习率调整策略,如 StepLR、MultiStepLR、ExponentialLR 等,每种策略都有其特点和应用场景,如 StepLR 用于周期性调整学习率,以加速收敛。
SWA(随机权重平均)是一种优化算法,通过在训练过程中计算模型参数的平均值,可以得到更稳定的模型,提高泛化性能。SWA 涉及 AveragedModel 类,用于更新模型的平均参数,以及 update_bn 函数,用于在训练过程中更新批量归一化参数。
总结,torch.optim 提供了丰富的优化算法接口,可以根据模型训练的需求灵活选择和配置,以达到最佳的训练效果和泛化性能。通过深入理解这些优化器和学习率调整策略,开发者可以更有效地训练深度学习模型。
pytorch 源码解读进阶版 - 当你 import torch 的时候,你都干了些什么?(施工中)
使用PyTorch,无论是训练还是预测,你首先编写的代码通常如下所示:
依据Python代码的编写规则,导入逻辑将去相应的PyTorch site-package目录寻找__init__.py文件,具体路径为:${ python_path}/lib/python3.8/site-packages/torch/__init__.py
本章节聚焦于__init__.py 这个Python文件,从这里开始深入剖析,探究在一行简单的`import torch`命令背后,PyTorch是如何完成关键基础设置的初始化。
重点一:从`from torch._C import *`开始
在__init__.py 中,首先跳过一些系统环境的检查和判断逻辑,核心代码段为`from torch._C import *`,具体位置如下(github.com/pytorch/pytorch...):
这代表了典型的C++共享库初始化过程,遵循CPython代码组织规则,spring源码类介绍`torch._C`模块对应一个名为PyInit__C的函数。在文件torch/csrc/stub.c中,找到了此函数的相关定义(github.com/pytorch/pytorch...)。
initModule被视为PyTorch初始化过程中的第一层调用栈,深入探讨此函数中的关键内容。
Pytorch hook 与 dataparallel 使用—— deoldify 源码解析 part1
在调整项目deoldify从单GPU到多GPU训练时,遭遇了一系列问题,促使我对PyTorch的理解进一步加深。项目中的Unet结构在上采样过程中使用了skip connection,通常做法是硬编码实现,这种方式简洁明了,但若需要改变网络结构,如从resnet调整为resnet,这样的硬编码方式显然不够灵活。
deoldify采取了另一种方法,在需要保存输出的网络层中插入自定义的hook函数,并利用PyTorch的register_forward_hook接口,确保每次前向传播时都能触发该函数,从而保存输出以供后续使用。自定义hook的核心代码展示了这一过程。
在单GPU训练中,上述方法运行正常,然而在多GPU环境下,遇到了hook存储的值与concat操作的权重不在同一GPU设备上的问题,引发错误。起初,我误以为nn.DataParallel会自动处理这个问题,但事实并非如此,我开始了深入的debug之旅。
首先,成功复现了错误现象,发现存储在hook中的值分布不均,部分在GPU1上,其他在GPU0上。这表明nn.DataParallel并没有将hook备份并分发到每个GPU上,而是多个GPU共享同一个Hooks类及接口。进一步检查发现,不同线程对应的hook接口及存储值的内存地址相同,这证实了hook并不适用于多GPU运行环境。
为解决这一问题,参考了相关文献,并将hook接口进行了修改,excel导入查询源码引入当前线程ID作为键,值对应输出,从而实现了线程安全。这一调整使得程序在第一个迭代周期正常运行。值得注意的是,第二个迭代周期又出现了问题,但这与hook的多线程运行无关,详情请见后续文章。
在debug过程中,为了简化操作,插入打印信息来观察多线程运行情况。然而,在获取hook中多线程运行信息时,遇到了异常,因获取`self.stored[key]`时报出`dict找不到key`的错误,这是因为多线程在写入`hook.stored`时,for循环期间警告`self.stored`的大小发生变化,这表明发生了并发错误,部分值并未正确写入。最终,删除了打印代码,程序恢复正常运行。
本次经历不仅解决了多GPU环境下hook使用的问题,也加深了我对PyTorch多GPU运行机制的理解,特别是关于线程安全和并发操作的注意事项。
Pytorch深入剖析 | 1-torch.nn.Module方法及源码
torch.nn.Module是神经网络模型的基础类,大部分自定义子模型(如卷积、池化或整个网络)均是其子类。torch.nn.Parameter是继承自torch.tensor的子类,用以表示可训练参数。定义Module时,可以使用个内置方法,例如add_module用于添加子模块,children和named_children用于获取子模块,modules和named_modules用于获取所有模块,register_parameter用于注册参数,parameters和named_parameters用于获取参数,get_parameter用于获取指定参数等。Module还支持数据格式转换,如float、double、half和bfloat,以及模型的设备移动,如cpu、cuda和xpu。训练模式调整可以通过train和eval方法实现。模型参数的梯度可以使用zero_grad方法清零。
模型的前向传播由forward方法定义,而apply方法允许应用特定函数到模型的所有操作符上。模型状态可以通过state_dict和load_state_dict方法进行保存和加载,常用于保存模型参数。此外,模型可以设置为训练模式或评估模式,影响特定模块如Dropout和BatchNorm的行为。
在PyTorch中,hook方法用于在前向和反向传播过程中捕获中间变量。注册hook时,可以使用torch.Tensor.register_hook针对张量注册后向传播函数,torch.nn.Module.register_forward_hook针对前向传播函数,torch.nn.Module.register_forward_pre_hook用于在前向传播之前修改输入张量,以及torch.nn.Module.register_backward_hook用于捕获中间层的梯度输入和输出。
通过这些方法,开发者可以灵活地调整、监控和优化神经网络模型的行为,从而实现更高效、更精确的模型训练和应用。利用hook方法,用户可以访问中间变量、修改输入或输出,以及提取特征图的梯度,为模型的定制化和深入分析提供了强大的工具。
Pytorch之Dataparallel源码解析
深入解析Pytorch之Dataparallel源码
在深入理解Dataparallel原理之前,需要明白它的使用场景和目的。Dataparallel设计用于在多GPU环境下并行处理数据,提高模型训练效率。
初始化阶段,Dataparallel需要实例化一个模型。这一步中,模型的参数会被复制到所有可用的GPU上,从而实现并行计算。
在前向传播阶段,Dataparallel的核心作用体现出来。它会将输入数据分割成多个小批次,然后分别发送到各个GPU上。在每个GPU上执行前向传播操作后,结果会被收集并汇总。这样,即便模型在多GPU上运行,输出结果也如同在单GPU上运行一样。
具体实现中,Dataparallel会利用Python的多重继承和数据并行策略。它继承自nn.Module,同时调用nn.DataParallel的构造函数,从而实现并行计算。
对于那些需要在GPU间共享的状态或变量,Dataparallel还提供了相应的管理机制,确保数据的一致性和计算的正确性。这样的设计使得模型能够高效地在多GPU环境下运行,同时保持代码的简洁性和易读性。
总结而言,Dataparallel通过分割数据、并行执行前向传播和收集结果的机制,实现了高效的数据并行训练。理解其源码有助于开发者更好地利用多GPU资源,提升模型训练效率。
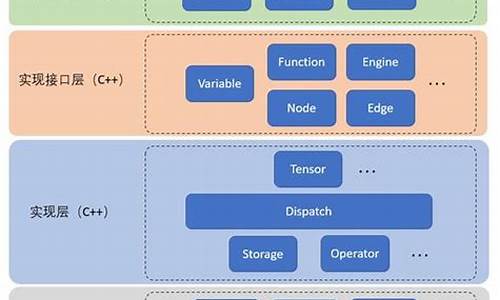
PyTorch 源码分析(一):torch.nn.Module
nn.Module是PyTorch中最核心和基础的结构,它是操作符/损失函数的基类,同时也是组成各种网络结构的基类(实际上是由多个module组合而成的一个module)。
在Python侧,2.1回调函数注册,2.2 module类定义中,有以下几个重点函数:
重点函数一:将模型的参数移动到CUDA上,内部会遍历其子module。
重点函数二:将模型的参数移动到CPU上,内部会遍历其子module。
重点函数三:将模型的参数转化为fp或者fp等,内部会遍历其子module。
重点函数四:forward函数调用。
重点函数五:返回该net的所有layer。
在类图中,PyTorch的算子都是module的子类,包括自定义算子和整网定义。
在C++侧,3.1 module.to("cuda")详细分析中,本质是将module的parameter&buffer等tensor移动到CUDA上,最终调用的是tensor.to(cuda)。
3.2 module.load/save逻辑中,PyTorch模型保存分为两种,一种是纯参数,一种是带模型结构(PyTorch中的模型结构,本质上是由module、sub-module构造的一个计算图)。
parameter、buffer是通过key-value的形式来存储和检索的,key为module的.name,value为存储具体数据的tensor。
InputArchive/OutputArchive的write和read逻辑。
通过Module,PyTorch将op/loss/opt等串联起来,类似于一个计算图。基于PyTorch构建的ResNet等模型,是逐个算子进行计算的,tensor在CPU和GPU之间来回流动,而不是整个计算都在GPU上完成(即中间计算结果不出GPU)。实际上,在进行推理时,可以构建一个计算图,让整个计算图的计算都在GPU上完成,不知道是否可行(如果GPU上有一个CPU就可以完成这个操作,不知道tensorrt是否是这样的操作)。
Pytorch源码剖析:nn.Module功能介绍及实现原理
nn.Module作为Pytorch的核心类,是构建模型的基础。它提供了一系列功能,包括记录模型的参数,实现网络的前向传播,加载和保存模型数据,以及进行设备和数据类型转换等。这些功能在模型的训练和应用中起到关键作用。
在训练与评估模式间切换,模块的行为会有所不同,如rrelu、dropout、batchnorm等操作在两种模式下表现不同。可学习的参数,如权重和偏置,需要通过梯度下降进行更新。非学习参数,比如batchnorm的running_mean,是训练过程中的统计结果。_buffers包含的Tensor不作为模型的一部分保存。
模块内部包含一系列钩子(hook)函数,用于在特定的前向传播或反向传播阶段执行自定义操作。子模块列表用于存储模型中的所有子模块。
魔术函数__init__在声明对象时自动调用,优化性能的关键在于使用super().__setattr__而非直接赋值。super调用父类的方法,避免不必要的检查,提高效率。使用register_buffer为模块注册可变的中间结果,例如BatchNorm的running_mean。register_parameter用于注册需要梯度下降更新的参数。
递归应用函数用于对模型进行操作,如参数初始化。可以将模型移动到指定设备,转换数据类型,以及注册钩子函数以实现对网络的扩展和修改。
调用魔术方法__call__执行前向传播。nn.Module未实现forward函数,子类需要提供此方法的具体实现。对于线性层等,forward函数定义了特定的运算流程。从检查点加载参数时,模块自动处理兼容性问题,确保模型结构与参数值的兼容。
模块的__setattr__方法被重写,以区别对待Parameter、Module和Buffer。当尝试设置这些特定类型的属性时,执行注册或更新操作。其他属性的设置遵循标准的Python行为。
模块的save方法用于保存模型参数和状态,确保模型结构和参数值在不同设备间转移时的一致性。改变训练状态(如将模型切换到训练或评估模式)是模块管理过程的重要组成部分。
PyTorch 源码解读之 torch.utils.data:解析数据处理全流程
文@ 目录 0 前言 1 Dataset 1.1 Map-style dataset 1.2 Iterable-style dataset 1.3 其他 dataset 2 Sampler 3 DataLoader 3.1 三者关系 (Dataset, Sampler, Dataloader) 3.2 批处理 3.2.1 自动批处理(默认) 3.2.2 关闭自动批处理 3.2.3 collate_fn 3.3 多进程处理 (multi-process) 4 单进程 5 多进程 6 锁页内存 (Memory Pinning) 7 预取 (prefetch) 8 代码讲解 0 前言 本文以 PyTorch 1.7 版本为例,解析 torch.utils.data 模块在数据处理流程中的应用。 理解 Python 中的迭代器是解读 PyTorch 数据处理逻辑的关键。Dataset、Sampler 和 DataLoader 三者共同构建数据处理流程。 迭代器通过实现 __iter__() 和 __next__() 方法,支持数据的循环访问。Dataset 提供数据获取接口,Sampler 控制遍历顺序,DataLoader 负责加载和批处理数据。 1 Dataset Dataset 包括 Map-style 和 Iterable-style 两种,分别用于索引访问和迭代访问数据。 Map-style dataset 通过实现 __getitem__() 和 __len__() 方法,支持通过索引获取数据。 Iterable-style dataset 实现 __iter__() 方法,适用于随机访问且批次大小依赖于获取数据的场景。 2 Sampler Sampler 用于定义数据遍历的顺序,支持用户自定义和 PyTorch 提供的内置实现。 3 DataLoader DataLoader 是数据加载的核心,支持 Map-style 和 Iterable-style Dataset,提供单多进程处理和批处理等功能。 通过参数配置,如 batch_size、drop_last、collate_fn 等,DataLoader 实现了数据的自动和手动批处理。 4 批处理 3.2.1 自动批处理(默认) DataLoader 默认使用自动批处理,通过参数控制批次生成和样本整理。 3.2.2 关闭自动批处理 关闭自动批处理,允许用户自定义批处理逻辑或处理单个样本。 3.2.3 collate_fn collate_fn 是手动批处理时的关键,用于整理单个样本为批次。 5 多进程 多进程处理通过 num_workers 参数启用,加速数据加载。 6 单进程 单进程模式下,数据加载可能影响计算流程,适用于数据量小且无需多进程的场景。 7 锁页内存 (Memory Pinning) Memory Pinning 技术确保数据在 GPU 加速过程中快速传输,提高性能。 8 代码讲解 通过具体代码分析,展示了 DataLoader 的初始化、迭代和数据获取过程,涉及迭代器、Sampler 和 Dataset 的交互。