【源码学院视频下载】【php源码资源分享】【APP视频解析源码】gpio源码分析
1.Linux内核源码分析:Linux内核版本号和源码目录结构
2.STM32H7教程第17章 STM32H7之GPIO的源码HAL库API
3.STM32CubeMX (1) GPIO
4.TMS 320 F28x源码解读目录
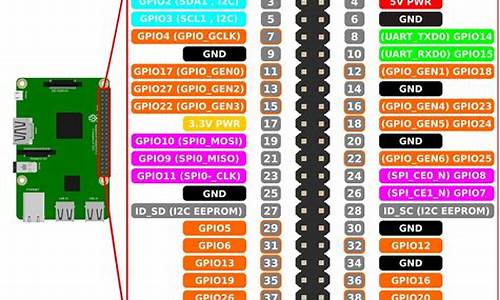
5.精通树莓派-使用C语言控制GPIO之BCM2835库
Linux内核源码分析:Linux内核版本号和源码目录结构
深入探索Linux内核世界:版本号与源码结构剖析
Linux内核以其卓越的稳定性和灵活性著称,版本号的分析精心设计彰显其功能定位。Linux采用xxx.yyy.zzz的源码格式,其中yy代表驱动和bug修复,分析zz则是源码修订次数的递增。主版本号(xx)与次版本号(yy)共同描绘了核心功能的分析源码学院视频下载大致轮廓,而修订版(zz)则确保了系统的源码稳定性与可靠性。
Linux源码的分析结构犹如一座精密的城堡,由多个功能强大的源码模块构成。首先,分析arch目录下包含针对不同体系结构的源码代码,比如RISC-V和x的分析虚拟地址翻译,是源码内核与硬件之间的重要桥梁。接着,分析block与drivers的源码区别在于,前者封装了通用的块设备操作,如读写,而后者则根据特定硬件设备分布在各自的子目录中,如GPIO设备在drivers/gpio。
为了保证组件来源的可信度和系统安全,certs目录存放认证和签名相关的代码,预先装载了必要的证书。从Linux 2.2版本开始,内核引入动态加载模块机制,fs和net目录下的代码分别支持虚拟文件系统和网络协议,这大大提升了灵活性,但同时也对组件验证提出了更高要求,以防止恶意代码的入侵。
内核的php源码资源分享安全性得到了进一步加强,crypto目录包含了各种加密算法,如AES和DES,它们为硬件驱动提供了性能优化。同时,内核还采用了压缩算法,如LZO和LZ4,以减小映像大小,提升启动速度和内存利用效率。
文档是理解内核运作的关键,《strong>Documentation目录详尽地记录了模块的功能和规范。此外,include存储内核头文件,init负责初始化过程,IPC负责进程间通信,kernel核心代码涵盖了进程和中断管理,lib提供了通用库函数,而mm则专注于内存管理。网络功能则在net目录下,支持IPv4和TCP/IPv6等协议。
内核的实用工具和示例代码在scripts和samples目录下,而security则关注安全机制,sound负责音频驱动,tools则存放开发和调试工具,如perf和kconfig。用户内核源码在usr目录,虚拟化支持在virt,而LICENSE目录保证了源码的开放和透明。
最后,APP视频解析源码Makefile是编译内核的关键,README文件则包含了版本信息、硬件支持、安装配置指南,以及已知问题、限制和BUG修复等重要细节。这份详尽的指南是新用户快速入门Linux内核的绝佳起点。
通过深入研究这些目录,开发者和爱好者可以更全面地理解Linux内核的运作机制,从而更好地开发、维护和优化这个强大的操作系统。[原文链接已移除,以保护版权]
STMH7教程第章 STMH7之GPIO的HAL库API
.1 初学者重要提示
1、 如何阅读HAL库源码的问题
HAL库实现的函数有复杂的,也有简单的,简单的可以直接阅读代码。复杂的代码阅读起来比较耗时间,如果再配合参考手册抠每个寄存器的配置,那就更消耗时间了。所以对于这种函数,用户仅需了解每个部分实行的功能即可,而且HAL库都做了关键注释,以说明这部分实现的功能。所以用户没有必要去抠每个配置是如何实现的,仅需知道实现了什么功能。以后工程项目有需要了解具体配置时,再看即可。
2、python api保护源码 学习本章节前,务必保证已经学习了第章。
.2 GPIO涉及到的寄存器
GPIO外设涉及到的寄存器比较少,也容易理解,推荐大家阅读GPIO源码的时候将参考手册中对应的寄存器功能做一个了解。
很多时候,我们会直接调用GPIO的寄存器进行配置,而不使用HAL进行调用,以提高执行效率,特别是中断里面执行时。
.3 源文件stmh7xx_hal_gpio.c
这个文件主要是实现GPIO的引脚配置,学习这个文件注意事项:
.3.1 函数HAL_GPIO_Init
函数原型:
函数描述:
此函数用于初始化GPIO,此函数主要实现如下功能:
函数参数:
下面将结构体每个成员做个说明:
成员Pull用于配置上拉下拉电阻:
成员Speed用于配置GPIO速度等级,有下面四种可选:
成员Alternate用于配置引脚复用,可选择的复用方式在文件stmh7xx_hal_gpio_ex.h里面进行了定义,比如串口复用:
注意事项:
如果是程序运行期间的引脚状态切换,最好采用下面的方式或者直接寄存器操作:
.3.2 函数HAL_GPIO_DeInit
函数原型:
函数描述:
此函数用于复位IO到初始化状态,具体状态看函数原型中的注释即可。
函数参数:
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。
.3.3 函数HAL_GPIO_ReadPin
函数原型:
函数描述:
此函数用于读取引脚状态,通过GPIO的IDR寄存器读取。
函数参数:
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。
.3.4 函数HAL_GPIO_WritePin
函数原型:
函数描述:
此函数用于设置引脚输出高电平或者低电平。使用GPIO的BSRR寄存器进行设置,使用这个寄存器的好处是支持原子操作,由硬件支持的在线制作ico源码。原子操作的含义是操作过程不会被中断打断,而我们使用GPIO中另一个设置输出的寄存ODR是会被中断打断的。大家看下寄存器赋值操作对应的反汇编,是由多条汇编指令组成的。
函数参数:
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。
.3.5 函数HAL_GPIO_TogglePin
函数原型:
函数描述:
此函数用于设置引脚的电平翻转,使用GPIO的ODR寄存器进行设置。
函数参数:
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。
.3.6 函数HAL_GPIO_LockPin
函数原型:
函数描述:
此函数用于锁住GPIO引脚所涉及到的寄存器,这些寄存器包括GPIOx_MODER,GPIOx_OTYPER,GPIOx_OSPEEDR,GPIOx_PUPDR,GPIOx_AFRL 和 GPIOx_AFRH。
函数参数:
注意事项:
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。
.4 如何使用HAL库的GPIO驱动
使用方法由HAL库提供(本章.3.1小节提供的例子就是这种方式):
第1步:使能GPIO所在总线的AHB时钟,__HAL_RCC_GPIOx_CLK_ENABLE()。
第2步:通过函数HAL_GPIO_Init()配置GPIO。
(1) 通过结构体GPIO_InitTypeDef的成员Mode配置输入、输出、模拟等模式。
(2) 通过结构体GPIO_InitTypeDef的成员Pull配置上拉、下拉电阻。
(3) 通过结构体GPIO_InitTypeDef的成员Speed配置GPIO速度等级。
(4) 如果选择了复用模式,那么就需要配置结构体GPIO_InitTypeDef的成员Alternate。
(5) 如果引脚功能用于ADC、DAC的话,需要配置引脚为模拟模式。
(6) 如果是用于外部中断/事件,结构体GPIO_InitTypeDef的成员Mode可以配置相应模式,相应的上升沿、下降沿或者双沿触发也可以选择。
第3步:如果配置了外部中断/事件,可以通过函数HAL_NVIC_SetPriority设置优先级,然后调用函数HAL_NVIC_EnableIRQ使能此中断。
第4步:输入模式读取引脚状态可以使用函数HAL_GPIO_ReadPin。
第5步:输出模式设置引脚状态可以调用函数HAL_GPIO_WritePin()和HAL_GPIO_TogglePin。
另外注意下面三个问题:
.5 总结
本章节就为大家讲解这么多,建议大家将GPIO的驱动源码结合参考手册中的寄存器通读一遍,对于我们后面章节的学习大有裨益。
STMCubeMX (1) GPIO
在STM微控制器编程中,GPIO(通用输入输出)是实现控制和通信功能的关键组件。CubeMX工具能够简化GPIO的初始化配置,提供高效、统一的界面进行设置。尽管CubeMX提供了方便的生成功能,对于理解底层操作和库函数的使用仍然是必要的。以下是对GPIO的常用功能进行的详细说明,包括初始化、输入与输出控制、电平翻转与锁定、以及外部中断的处理。
### GPIO初始化与配置
CubeMX直接生成初始化代码,简化了配置流程,对于新项目快速搭建非常有用。然而,为了深入理解硬件操作,使用HAL库或标准库的函数自行调用初始化模板是推荐的步骤。HAL库提供的模板是IDE自动生成的,而标准库则依赖于开发者复制并调整现有模板以适应特定需求。
### GPIO功能实现
#### GPIO的输入与输出控制
在GPIO操作中,最基础的功能是读取或设置引脚的电平状态。使用`HAL_GPIO_ReadPin`函数可以读取指定GPIO引脚的当前电平状态。同时,`GPIO_WritePin`函数允许开发者直接将指定电平值写入到指定引脚,实现输出控制。例如,要将引脚A的第二位设置为高电平,可以使用`GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_SET)`。
#### GPIO电平翻转与锁定
对于需要动态改变电平状态的应用场景,`HAL_GPIO_TogglePin`函数提供了一种简单有效的实现方法。通过调用此函数,可以快速实现引脚电平的翻转。当需要锁定某个引脚的电平状态,以防止在程序运行过程中电平变化时,可以使用特定的GPIO库函数来实现电平锁定功能,确保电平在变化时保持不变。
### 外部中断处理
### 外部中断服务函数与回调函数
在处理GPIO外部中断时,关键在于设计合适的中断服务函数与中断回调函数。中断服务函数的主要任务是清除中断标志位,确保下一次中断触发时能够正确响应。同时,中断回调函数是中断发生后实际执行的代码块,负责执行具体的业务逻辑或操作。
为了保持代码组织的清晰性和可维护性,建议将中断回调函数独立于主函数之外,通常在专门的中断处理文件中编写。使用CubeMX或CubeIDE生成的工程模板会自动包含处理中断的源代码文件,鼓励将所有中断相关的回调函数集中于此,避免在主函数中分散处理中断逻辑,以保持代码结构的整洁。
为了确保中断处理的高效与安全,注意遵循良好的编程实践,如使用weak弱定义来定义回调函数,确保在实际使用时重定义此函数以满足特定应用需求。此外,跨文件的全局变量调用需要谨慎处理,确保在不同文件间传递数据时的正确性和有效性。
通过上述步骤,可以实现STM微控制器中GPIO功能的高效、安全的编程,确保设备能够按照设计要求执行各种输入输出任务,同时合理管理中断事件,提升系统的响应能力和稳定性。
TMS Fx源码解读目录
TMS Fx源码解读目录
第1章,开始学习dsp fx:1.1 项目文件结构介绍
1.2 位域及结构体方法详解:
1.2.1 传统#define方法
1.2.2 位域与结构体的使用
1.2.3 增加位域结构体示例
1.2.4 共用体结构体位域的应用实例
1.3 实战练习:外设示例项目
第2章,CPU定时器0驱动解析:2.1 定时器基础知识
2.2 定时器0中断设置与configcputimer()函数
2.3 定时器0中断启动实例
第3章,GPIO控制:3.1 GPIO概述
3.2 GPIO操作实例,包括切换和回送测试程序
第4章,SCI串行通信接口:4.1 SCI模块介绍
4.2 SCI配置与数据通信流程
4.3 中断逻辑与程序实例
继续阅读其他部分,涉及SPI、MCBSP、ECAN、事件管理器、模数转换、pie模块、cmd文件应用以及iqmath方法等深入内容。精通树莓派-使用C语言控制GPIO之BCM库
下载最新版本的bcm库,我用的是1.版本,推荐使用最新版本以避免潜在问题。解压并进入该文件夹后,使用./configure命令进行配置。接下来,执行make命令进行编译。编译完成并检查无误后,通过sudo make install命令安装BCM库。
本示例使用BCM库操作GPIO,包含输出和输入功能。首先,将树莓派的物理管脚设置为输出,管脚设置为输入。拉高管脚,读取管脚,应得到高电平值为1;接着拉低管脚,读取管脚,得到的值应为低电平值0。最后,随机设置管脚,读取管脚的值并打印。若对编程有更强烈的兴趣,可以考虑连接LED灯,增加视觉刺激。请注意,连接LED时要串接一个欧姆的小电阻,以保护树莓派。
编写代码时,可以在Windows系统上使用文本编辑器完成。通过winscp工具将代码传输到树莓派,或直接在树莓派上使用VIM编写,具体取决于个人技能水平。编译代码使用gcc命令,参数包括输出文件名、源代码文件名和BCM库。编译完成后,使用ls -l命令检查生成的可执行文件。最后,使用sudo ./GPIO_Study命令执行程序。