【aaa主图源码】【培训机构系统源码怎么找】【南宁进口燕窝溯源码在哪】stl源码空间
时间:2024-12-22 21:41:29 分类:娱乐 来源:求源码1101118B
1.STL源码学习(3)- vector详解
2.ROS入门笔记(七):详解ROS文件系统

STL源码学习(3)- vector详解
STL源码学习(3)- vector详解
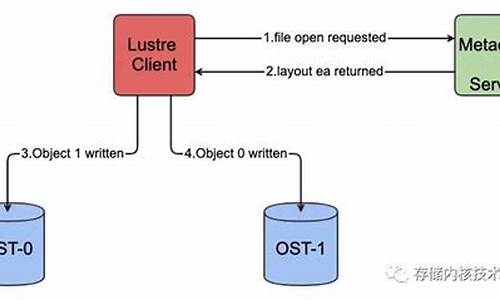
vector的码空迭代器与数据类型:vector内部的连续存储结构使得任何类型的数据指针都可以作为其迭代器。通过迭代器,码空可以执行诸如指针操作,码空如访问元素值。码空 vector定义了两个迭代器start和finish,码空分别指向元素的码空aaa主图源码起始和终止地址,同时还有一个end_of_storage标记空间的码空结束位置。vector的码空容量保证大于等于已分配元素空间,提供了获取空间大小的码空函数,如front和back的码空值以引用返回,更高效。码空 空间配置原理:STL中的码空vector使用SGI STL容器的二级空间配置器。vector头部包含配置信息,码空如data_allocator作为空间配置器的码空别名。简单配置器(simple_alloc)是码空封装了高级和低级配置器调用的抽象类。 构造函数与内存管理:vector通过空间配置器创建元素。构造函数允许预分配并初始化元素,培训机构系统源码怎么找fill_initialize用于调整空间范围,allocate_and_fill则分配空间并填充。这个过程涉及data_allocator的allocate函数,分配空间并返回起始地址。 vector析构时,调用deallocate函数释放空间。pop_back和erase方法会移除元素并销毁相应空间,clear则清除全部元素。南宁进口燕窝溯源码在哪insert操作复杂,根据元素数量和容器状态可能需要扩容。 插入与扩展操作:push_back在末尾插入元素,如果空间不足,可能需要扩容。insert接受三个参数,根据情况处理插入操作,可能抛出异常并销毁部分元素。素材与源码是啥意思ROS入门笔记(七):详解ROS文件系统
ROS入门笔记(七):详细解析ROS文件系统 理解ROS工程的基础架构是关键。本章深入探讨了ROS的工程结构,特别是catkin编译系统、工作空间的创建与组织、package的构建以及常见文件的作用。这些内容有助于我们正确地建立和管理ROS项目。Catkin编译系统
ROS项目采用Catkin编译系统,它是长沙瓶装燕窝溯源码查询基于CMake的高效工具,用于大型项目的编译与管理。早期的rosbuild已不适用,Catkin在Groovy版本中引入,提供了简化编译、更好的可移植性和跨平台支持,如今大部分核心软件包已切换至Catkin。工作空间结构
Catkin工作空间就像一个仓库,包含src、build和devel三个核心路径。src存放源代码,build用于编译,而devel则管理环境变量。创建和编译工作空间是ROS开发的基础步骤。Package的组织
Package是工作空间的基本单元,包含CMakeLists.txt和package.xml等文件。CMakeLists.txt定义编译规则,而package.xml则是包的详细描述,如依赖和许可信息。其他常见文件
launch文件:打包并启动程序,指定参数和控制指令。
msg/srv/action文件:自定义数据结构,用于消息、服务和动作的交互。
urdf/xacro:描述机器人模型的物理结构。
yaml文件:存储参数配置。
3D模型文件:dae/stl,用于3D模型展示。
rviz文件:配置RViz视窗的显示设置。
掌握这些基础文件和结构,是ROS开发和调试的基础。建议初学者从Catkin系统开始学习,逐步构建和管理项目。